XiaoMi-AI文件搜索系统
World File Search Systemwheel


车轮对齐
360° measurement field for permanent self-check and adjustment of system to movement and vibrations Rolling runout compensation eliminates time-consuming raising of vehicle and single-wheel compensation No calibration to a specific lift allows a measurement on any wheel alignment bay Wireless data transfer and integrated battery enable full mobility and allow the use of Windows tablets or Laptops Intelligent and space-saving charging solution that can be mounted on any wall Quality made在德国也可以作为套件版本;已经存在的对齐湾的理想选择
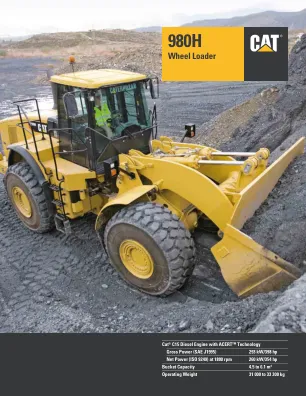
980H - 轮式装载机
Caterpillar 设计的组件。用于制造 Cat 轮式装载机的组件均按照 Caterpillar 质量标准进行设计和制造,以确保即使在极端操作条件下也能发挥最佳性能。发动机电子控制模块和传感器完全密封,防潮防尘。Deutsch 连接器和电线编织确保电气连接能够抵抗腐蚀和过早磨损。软管经过精心设计和制造,具有高耐磨性、出色的灵活性以及易于安装和更换的特点。Caterpillar 软管接头使用 O 形环面密封件提供可靠的密封,实现持久无泄漏的连接。重型组件可降低泄漏、腐蚀和过早磨损的风险,从而增加正常运行时间并有助于保护环境。

反作用轮 VRW-D-6
轮子速度由运行在 32 位微处理器中的模型支持的 PI 环路控制,该微处理器在功率级使用低噪声高效四象限 PWM 方法。轮驱动电子设备包括热保护和过压保护电路。信号接口是 RS422/RS485 级别的标准异步 SCI。它可用于单全双工配置以及半双工总线架构。波特率可调至 1Mbaud。还提供冗余 CAN 总线接口。反作用轮设计保持模块化。通过改变转子几何形状、输入电压范围或通信协议,VRW 特性很容易适应客户需求。可以在扭矩控制模式或速度控制模式下灵活操作。这种反作用轮的标称在轨寿命超过 45,000 小时。
自动轮椅
arpita2003chatur@gmail.com, shivaibhonge85@gmail.com, gddalvi09@gmail.com 摘要:本文主要介绍我们的革命性发明:轮椅可以使用加速度传感器和头部运动来驱动,并可以避开障碍物。我们的自动轮椅项目基本上基于加速度原理,一个加速度传感器提供两个轴,加速度传感器的输出根据施加在其上的加速度而变化,通过应用简单的公式,我们可以计算倾斜量,倾斜的输出将决定向哪个方向移动。椅子上将安装雨量传感器。雨量传感器模块是一种简单的雨量检测工具。当雨滴落入雨板时,它可以用作开关,也可用于测量降雨强度。我们正在尝试制造一辆受控轮椅;该系统将理解并服从自然语言运动命令,例如“右转”。开发这样的系统使用了各种技术。关键词:革命性,轮椅,雨量传感器,方向和移动,温度传感器

通过头部运动控制的轮椅
1,2,3 BE, 4 教授电气和电子通信工程系,Paavai 工程学院,Paavai Nagar,NH-7,Namakkal,泰米尔纳德邦 637018,印度。摘要:在这个项目中,我们利用头部运动为身体有障碍的人设计了一款智能轮椅。该项目的主要目标是为身体有障碍的人设计一款用户友好的轮椅,它基于头部运动和基于距离来检测障碍物或物体。这个项目包括超声波传感器和加速度计。超声波传感器用于确定轮椅与其对面障碍物之间的距离。轮椅的运动是根据身体有障碍者的头部运动来编程的。在移动期间,超声波传感器计算距离,如果轮椅靠近任何其他物体,轮椅就会发出警报并停止。这是控制轮椅的有效方法,左转和右转运动可以通过基于用户的头部运动轻松控制,当轮椅靠近任何障碍物时,它会自动停止。这种控制轮椅的方法让身体有障碍的人也可以轻松操作。关键词:MEMS 传感器、直流电机驱动器、Arduino 微控制器、超声波传感器、振动传感器、心跳传感器简介

自主的基于车轮的基因定位...
摘要 - 本地化是自动驾驶汽车系统的基本要求。自动驾驶汽车定位的最常使用的系统之一是全球定位系统(GPS)。然而,GPS的功能在很大程度上取决于卫星的可用性,这在某些情况下使其不可靠。因此,自动驾驶汽车必须具有自主的自定位功能,以确保其独立运行。探针技术来实现车辆定位。探光仪中采用的一种方法称为车轮频谱。车轮的探光法对周围环境的依赖程度较低,而不是视觉探光和激光探光仪。本研究旨在评估在本地化过程的背景下,自主轮椅的车轮频能测定法实现的性能。采用差分驱动运动模型来确定轮椅的预测姿势。该预测是从轮椅的线性和角速度的测量得出的。已经进行了几项实验,以评估基于车轮的定位的性能。在实验之前,还进行了校准程序,以确保对传感器的准确测量。