XiaoMi-AI文件搜索系统
World File Search System人工干预

人工智能远程监控和运营支持系统 MaiDAS ® 助力垃圾焚烧发电厂可持续发展
三菱重工环境化学工程有限公司 (MHIEC) 开发了 MaiDAS ®,这是用于废物转化能源 (WtE) 工厂的下一代基于 AI 的远程监控和运营支持系统。该系统可实现先进的自动化操作,同时保持工厂运行重要设备的正常运转,并优化蒸发量和废气浓度输出,同时消除与个别操作员相关的可变因素的影响。使用该系统可以实时预测低热值 (LHV)、废物进料量和燃烧条件等值。由系统控制的先进自动化操作可以大大减少人工干预。主蒸汽流量的稳定性也得到了确认。与该系统一起,已经开发的废物坑混合和进料支持系统的改进被认为可以实现稳定运行和降低成本,同时最大限度地提高 WtE 工厂的可持续性。

人工智能理论及其...特刊
人工智能是开发能够模仿人类能力甚至超越人类能力的计算机和机器人的领域。人工智能程序可以分析和情境化数据以提供信息或自动触发操作而无需人工干预。本期特刊的目标是为世界各地的科学家和院士提供一个平台,以促进、分享和讨论人工智能理论及其应用领域的各种新问题和发展。在本期特刊中,我们邀请一线研究人员和作者提交探索人工智能理论及其应用的原创研究和评论文章。在本期特刊中,潜在主题包括但不限于: 推理、解决问题 知识表示 自然语言处理 不确定推理的概率方法 机器意识、感知和思维 机器人与人工智能的区别 关于人类智能的知识 环境管理中的人工智能 医学成像中的人工智能

DGM机器学习和人工智能
单元描述 机器的决策能力越来越强,并在医疗保健、工程和营销等许多领域为人类提供帮助。机器学习 (ML) 是计算机获得无需人工干预即可解决问题的能力并随着数据的增加而提高学习能力的过程。由于拥有巨大的处理能力,机器可以比人类更快地识别特定模式。借助这些技术,用户能够提取决策模式。人工智能和机器学习在营销中的使用可以为营销人员提供有价值的信息,以提供个性化的宣传并为潜在客户开展更有效的活动。五项原则是思维模式和技能宣言的基础,也是所有课程框架和单元规范的基础。下述相关原则已与每个课程单元和每个级别的学习成果相对应(有关五项原则的完整描述,请参阅课程规范):
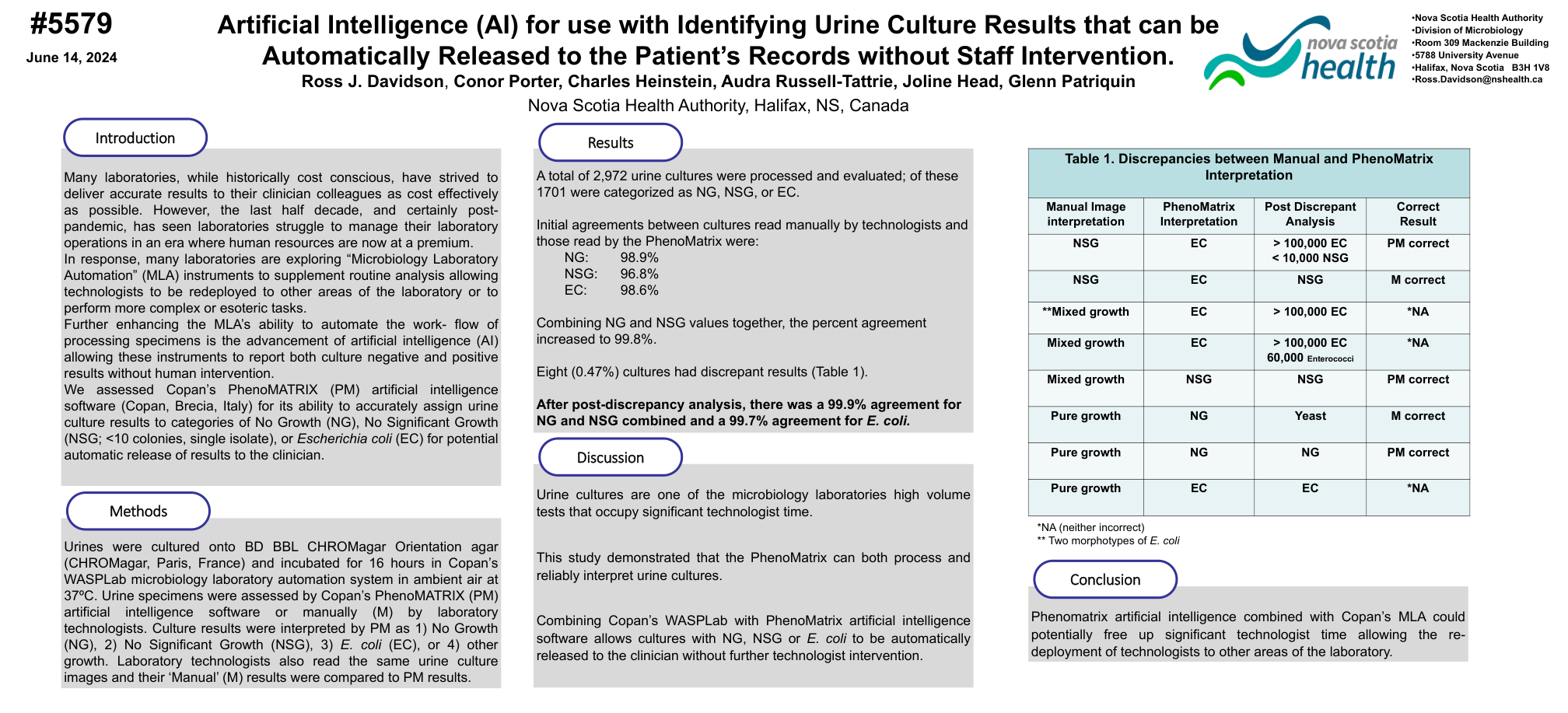
人工智能 (AI) 用于识别尿培养结果,无需工作人员干预即可自动发布到患者记录中。Ross J. Davidson、Conor Porter、Charles Heinstein、Audra Russell-Tattrie、Joline Head、Glenn Patriquin
许多实验室虽然历来注重成本,但一直努力以尽可能经济的方式向临床医生同事提供准确的结果。然而,在过去五年里,尤其是疫情后,实验室在人力资源极为宝贵的时代难以管理实验室运营。作为回应,许多实验室正在探索“微生物实验室自动化”(MLA)仪器来补充常规分析,允许技术人员重新部署到实验室的其他区域或执行更复杂或深奥的任务。人工智能(AI)的进步进一步增强了MLA自动化处理标本工作流程的能力,使这些仪器无需人工干预即可报告培养阴性和阳性结果。我们评估了 Copan 的 PhenoMATRIX (PM) 人工智能软件(意大利布雷西亚 Copan),该软件能够准确地将尿液培养结果分配到无生长 (NG)、无显著生长 (NSG;<10 个菌落,单个分离株) 或大肠杆菌 (EC) 类别,以便自动向临床医生发布结果。

国家利益研究博士学位...
数字化转型的推动技术之一是自主系统 (AS),该系统能够自动达到特定目标,无需人工干预。它们能够收集有关其运行环境的信息,处理来自多个来源的数据,确定和计划采取的行动以优化性能,确保人员的安全和设备的正常运行。自主系统能够在极其多样化的应用领域中实现可持续的问题解决,例如生产流程、汽车、航空航天、国防、公路和铁路移动、智慧城市、家庭自动化、能源网络、水网、环境监测、智慧农业、物流、电信、生物医药、绿色转型等。毫无疑问,它们将在社会中发挥关键作用:微软(https://www.microsoft.com/en-us/ai/autonomous-systems)和 ABB(https://new.abb.com/news/detail/15115/abb-leads-the-way-to-the-autonomous-industrial-future)等大型跨国公司最近启动了专注于自主系统的创新项目。
利用 RFID 资产跟踪技术减少重复...
RFID 和条形码是两种适用于不同应用的不同技术,有时会重叠。在许多情况下,RFID 比传统条形码更具优势,因为条形码需要直接视线读取,而 RFID 则不需要。也就是说,扫描仪必须“看到”条形码才能读取,这意味着人们通常必须将条形码朝向扫描仪才能读取。由于 RFID 技术不需要直接视线,因此当多个唯一编号的标签穿过无线电波供电的场地时,可以读取它们。无源(或非电池供电)RFID 技术可以在 35 英尺以上的距离读取场地中的数百个标签。这项技术在许多方面为用户带来了巨大的价值,并允许公司在收集重要数据的同时使用现有的工作流程来更有效地管理宝贵的资产。同时,由于 RFID 不需要人工干预(读取条形码),因此准确性更高,劳动力成本更低。

即插即用监控,利用肌肉和脑信号进行实时手势和错误检测
摘要 在各种潜在的安全关键场景中,对机器人进行有效的人工监督是确保机器人正确运行的关键。本文通过结合两种人体生物信号流(分别通过 EMG 和 EEG 获得的肌肉和大脑活动),朝着快速可靠的人工干预监督控制任务迈出了一步。它展示了使用肌肉信号对左手和右手手势进行连续分类、使用脑信号(在观察到错误时无意识产生)对错误相关电位进行时间锁定分类,以及结合这些管道在多项选择任务中检测和纠正机器人错误的框架。以“即插即用”的方式评估由此产生的混合系统,其中 7 名未经训练的受试者监督执行目标选择任务的自主机器人。离线分析进一步探索了 EMG 分类性能,并研究了选择可能促进可推广的即插即用分类器的训练数据子集的方法。
PTE AI 揭秘
人工智能 (AI) 最近在媒体上引起了不小的轰动,因为新技术的发展开始影响我们的日常生活,例如智能家居设备、面部识别软件甚至无人驾驶汽车。最近几个月最大的影响之一是虚拟助手的推出,例如 ChatGPT,它可以利用“大型语言模型”中可用的大量数据,无需人工干预即可生成和分析文本。毫不奇怪,媒体对此类技术对教育的影响进行了大量讨论。1 学生如何使用这些软件?他们是否将其用作学习的“捷径”?教育工作者如何判断一篇文章是由 ChatGPT 撰写的,而不是学生自己撰写的?这是否构成作弊?虽然现在大多数人都同意这种新型人工智能有潜力支持和加强教育,但我认为可以公平地说,人们仍然对这些新发展以及它们将对我们生活的方方面面产生的影响存在一定程度的怀疑。

开发空间探索漫游车数字双胞胎损坏检测
近年来,太空探索工作越来越集中于对火星和月球等行星和卫星的表面探索。这是通过使用流浪者来实现的,流浪者能够跨天体旅行并进行研究活动。但是,完成任务可能具有挑战性,必须及时解决问题,以避免丢失Sciminific Data甚至Rover本身。鉴于与火星(Olson,Matthies,Wright,Li,&di)的有限通信能力,必须迅速检测到异常,因为没有现场人工干预的可能性。要面对这个问题,NASA分别开始开发其漫游者的物理双胞胎,例如对好奇心和毅力的乐观情绪(Cook,C。,Johnson和Hautalu-Oma)(Castelluccio,)。同时,NASA和西门子研究了一个好奇的数字双胞胎,以使用SIM-DIOSOTOPE热电学发电机(MMRTG)使用SIM-Center 3D(M.I.T.,M.I.T.,)分析和解决由多损耗ra-Dioasotope热电学发电机(MMRTG)引起的散热问题。同样,欧洲航天局
即插即用监控,利用肌肉和脑信号进行实时手势和错误检测
摘要 在各种潜在的安全关键场景中,对机器人进行有效的人工监督是确保机器人正确运行的关键。本文通过结合两种人体生物信号流(分别通过 EMG 和 EEG 获得的肌肉和大脑活动),朝着快速可靠的人工干预监督控制任务迈出了一步。它介绍了使用肌肉信号对左手和右手手势进行连续分类、使用脑信号(在观察到错误时无意识产生)对错误相关电位进行时间锁定分类,以及结合这些管道在多项选择任务中检测和纠正机器人错误的框架。以“即插即用”的方式评估由此产生的混合系统,其中 7 名未经训练的受试者监督执行目标选择任务的自主机器人。离线分析进一步探索了 EMG 分类性能,并研究了选择可能促进可推广的即插即用分类器的训练数据子集的方法。