XiaoMi-AI文件搜索系统
World File Search System倾身
具身探索:利用虚拟现实为轮椅使用者提供远程无障碍评估
提前获取陌生地方的无障碍信息对于轮椅使用者更好地决定是否进行实地访问至关重要。如今的评估方法,例如电话、照片/视频或 360 度虚拟游览,往往无法提供针对个体差异所需的具体无障碍细节。例如,它们可能无法透露关键信息,例如桌子下面的腿部空间是否足够宽敞,或者设备的空间配置是否方便轮椅使用者使用。针对这一问题,我们提出了 Embodied Exploration,这是一种虚拟现实 (VR) 技术,可提供实地访问的体验,同时保持远程评估的便利性。Embodied Exploration 允许轮椅使用者利用越来越便宜的 VR 耳机,以化身的形式探索物理环境的高保真数字复制品。通过初步的探索性研究,我们调查了需求并不断改进我们的技术。通过对六名轮椅使用者进行真实世界用户研究,我们发现 Embodied Exploration 能够促进远程和准确的无障碍评估。我们还讨论了设计对具体化、安全性和实用性的影响。

国防部标准枪械术语(小型武器)目录 NDS Y 0002B
1043 后座利用长后座型 这是一种枪管和枪栓一体化、后座距离超过弹药总长度的后坐利用型。 连接到枪管并位于后部的枪栓由位于后座末端位置的闩锁固定,并且只有枪管由于复位弹簧的作用而向前移动,从而将弹壳踢出。枪栓上的闩锁被释放,枪栓向前移动以加载并关闭枪膛。

EmbodiedScan:面向具身 AI 的整体多模式 3D 感知套件
摘要 在计算机视觉和机器人领域,具身代理有望探索其环境并执行人类的指令。 这就需要能够根据第一人称观察充分理解 3D 场景,并将其语境化为语言进行交互。 然而,传统研究更多地侧重于从全局视角进行场景级输入和输出设置。 为了解决这一差距,我们引入了 EmbodiedScan,这是一个多模态、以自我为中心的 3D 感知数据集和整体 3D 场景理解的基准。 它包含超过 5k 个扫描,封装了 1M 个以自我为中心的 RGB-D 视图、1M 个语言提示、160k 个 3D 导向框,涵盖 760 多个类别,其中一些与 LVIS 部分一致,以及具有 80 个常见类别的密集语义占用率。 基于这个数据库,我们引入了一个名为 Embodied Perceptron 的基线框架。它能够处理任意数量的多模态输入,并表现出卓越的 3D 感知能力,无论是在我们建立的两个系列基准测试(即基本 3D 感知任务和基于语言的任务)中,还是在野外。

为... 设计一架可搭载 450 名乘客的混合翼身飞机
摘要:ACFA 2020(柔性飞机主动控制)是欧盟委员会第七研究框架计划资助的合作研究项目。该项目涉及 2020 年飞机配置(如翼身融合 (BWB) 飞机)的创新主动控制概念。ACFA 的主要目标是设计一种新型超高效 450 座 BWB 型飞机,以及为此类飞机提供强大的自适应多通道控制架构。新设计的控制器的目标是雄心勃勃地改善乘坐舒适度和操控品质,以及减轻 BWB 型飞机的负荷。根据实现的负荷减少,可以调整 450 座飞机的结构尺寸,以实现雄心勃勃的减重目标,从而进一步提高燃油效率。主动控制要求分别影响控制面和整体飞机设计的设计过程。因此,传统的飞机设计流程必须适应新的要求。本文描述的飞机设计框架已在 ACFA BWB 飞机的开发中证明了其效率。在一年的时间内,在多个领域要求的约束下开发了机身。本文介绍了 BWB 飞机设计活动的过程和结果,为详细概念分析以及多输入多输出控制架构的研究奠定了基础。

VIP™ 术前计划科学更新
与手动测量相比,VIP 和 Blueprint 术前规划在后倾和倾斜测量方面均有所不同,与手动测量相比,Blueprint 对后倾和倾斜的计算均过高。总体而言,与手动测量相比,VIP 术前规划对后倾的计算不足,对倾斜的计算过高(比 Blueprint 的幅度更大)。VIP 术前规划对后倾的计算最常与关节盂的下象限对齐,而 Blueprint 对上象限的计算最常与关节盂的上象限对齐。对于倾斜,两个系统对后象限的计算最常与关节盂的后象限对齐。
Tour-AD-DI-Hybrid-2020.pdf
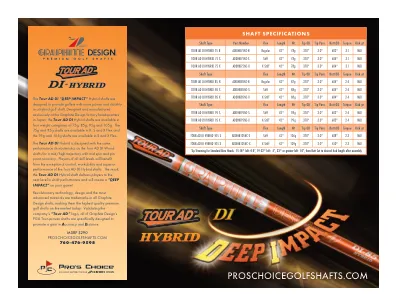
Tour AD DI Hybrid 的设计性能特点与 Tour AD DI Wood 杆身相同,具有中/高弹道、中等旋转和精准度。各种水平的球员都将受益于 Tour AD DI Hybrid 杆身的出色控制、可操作性和卓越性能。因此,Tour AD DI Hybrid 杆身将球员的杆身性能提升到一个新的水平,并将对您的比赛产生“深远影响”!

化学智能导师利用物理和虚拟操作进行具身学习
摘要。混合式教育技术可充分利用物理和虚拟操作的互补优势。然而,如何最好地结合这些操作尚不清楚。先前的研究侧重于结合物理和虚拟操作,根据它们是否突出特定概念按顺序提供它们。这项研究大多忽略了可以将学生的概念理解建立在身体动作上的具体学习机制。为了解决这个问题,我们对 80 名本科生进行了一项化学学习实验室实验。我们比较了虚拟和物理操作的不同排序方式,这些方式首先让学生参与到具体体验中,或者使目标概念突出。结果表明,在学习序列的早期提供具体体验可以增强概念学习。这些发现扩展了现有的物理和虚拟操作混合理论,并为混合交互式教育技术的开发人员提供了实用建议。

BEHAVIOR-1K:具有 1,000 个日常活动和现实模拟的具身 AI 基准
摘要:我们提出了 BEHAVIOR-1K,一个以人为本的机器人综合模拟基准。BEHAVIOR-1K 包括两个部分,分别由“您希望机器人为您做什么?”这一广泛调查的结果指导和推动。第一个部分是定义 1,000 种日常活动,基于 50 个场景(房屋、花园、餐厅、办公室等),其中有 5,000 多个对象,并标注了丰富的物理和语义属性。第二个部分是 O MNI G IBSON,这是一个新颖的模拟环境,它通过逼真的物理模拟和刚体、可变形体和液体的渲染来支持这些活动。我们的实验表明,BEHAVIOR-1K 中的活动是长期的并且依赖于复杂的操作技能,这两者对于最先进的机器人学习解决方案来说仍然是一个挑战。为了校准 BEHAVIOR-1K 的模拟与现实之间的差距,我们提供了一项初步研究,研究如何在模拟公寓中使用移动机械手学到的解决方案转移到现实世界中。我们希望 BEHAVIOR-1K 的人性化本质、多样性和现实性能够使其对具身化 AI 和机器人学习研究有价值。项目网站:https://behavior.stanford.edu。

野生系统理论:克服计算问题......
多年来,计算主义认知科学家在心智描述中运用表征和有效因的概念,而以动态系统为导向的生态心理学家则摒弃表征主义和有效因,转而主张多尺度、偶然相互作用和具身化。本文介绍了一种最近发展起来的具身化理论——野生系统理论 (WST),该理论就是为克服这种矛盾而开发的。WST 将生物体概念化为它们出现并维持自身的系统发育、文化、社会和发展背景的多尺度自我维持的具身化。这种自我维持的背景具身化自然且必然与它们所体现的多尺度背景有关。因此,意义(即内容)是它们的构成要素。这种内容方法克服了计算主义对表征的需求,同时满足了生态对多尺度偶然相互作用的偏好。