XiaoMi-AI文件搜索系统
World File Search System动态系统

对部分观察到的动态系统的深度学习
摘要:微分方程(EDP)是各种科学学科中动态系统月球化的基石。传统上,科学使用一种严格的方法与物理证明,收集余额并得出理论模型。ce-Ce持续时间,研究的简化和模拟可能会掩盖我们对基本现象的理解。本文探讨了从动态系统中获取的数据可用于改进和/或得出更好模型的方式。magriscript特别关注部分观察到的动力学,其中未完全测量或观察到系统的完整状态。感谢部分观察到的系统的理论,包括Mori-Zwanzig和Takens定理的形式主义,我们激励了非马克维亚结构,尤其是不同的延迟方程(EDR)。通过将神经网络的表达能力与EDR相结合,我们提出了用于系统的新模型
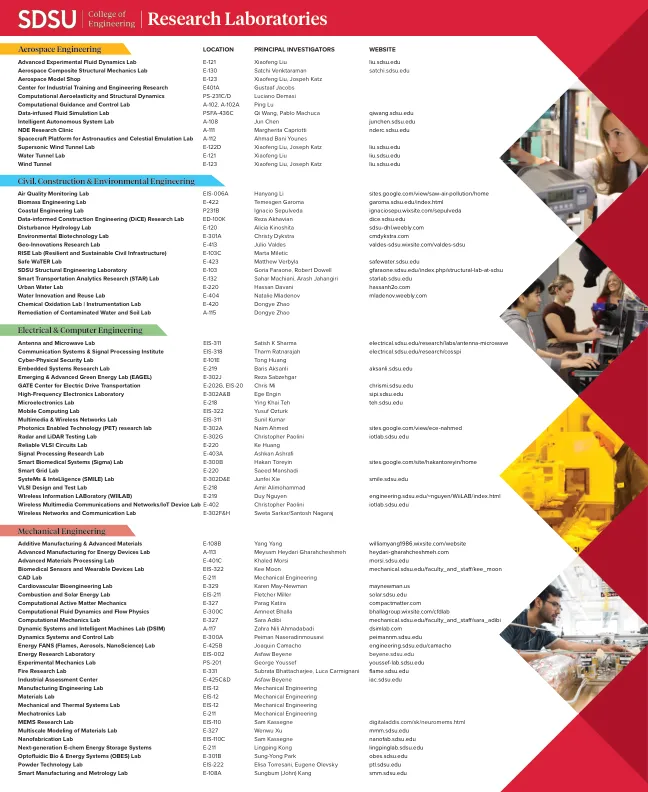
研究实验室
增材制造与先进材料 能源设备先进制造实验室 先进材料加工实验室 生物医学传感器与可穿戴设备实验室 CAD 实验室 心血管生物工程实验室 燃烧与太阳能实验室 计算活性物质力学 计算流体动力学与流动物理 计算力学实验室 动态系统与智能机器实验室 (DSIM) 动态系统与控制实验室 能源 FANS(火焰、气溶胶、纳米科学)实验室 能源研究实验室 实验力学实验室 火灾研究实验室 工业评估中心 制造工程实验室 材料实验室 机械与热系统实验室 机电一体化实验室 MEMS 研究实验室 材料多尺度建模实验室 纳米制造实验室 下一代 E-chem 储能系统 光流控生物与能源系统 (OBES) 实验室 粉体技术实验室 智能制造与计量实验室

用绝对...
研究人员研究了复杂的,不可预测的动态系统,其特征是复杂的细节和对初始条件的敏感性,这是通过对动态系统中类似特征的探索来证明的[1]。这种系统的显着特征是它们混乱的性质。混乱是指动态系统理论中的一种现象,而系统在有限的时间内表现出混乱的行为,然后稳定在周期性或准周期状态。这个概念已在各种领域进行了广泛的研究,包括物理,数学,工程和生物学。在1983年,Celso Grebogi,Edward Ott和James Yorke发表了一篇关于混乱的开创性论文,该论文证明了Lorenz系统中混乱的吸引者的有限寿命[2,3]。尽管洛伦兹系统具有固有的不可预测性,但作者证明可以通过分析不稳定的周期性轨道的动力学来预测混乱的行为。这项开创性的工作介绍了不稳定的周期性轨道的概念,并突出了它们在动态系统中混乱的出现中的重要性。Grebogi,Ott和Yorke激发了研究人员继续研究不同系统中的短暂性混乱,包括机械,电子和生物系统。这个领域在使用瞬态混乱来增强系统对小变化的敏感性方面取得了重大进展,该更改应用于加密和安全通信等各种应用程序。研究人员最近开始探索复杂网络中混乱与同步之间的关系。这项研究发现混乱可以帮助促进耦合振荡器网络中的同步,该网络具有潜在的应用领域的应用,例如电力系统和通信网络。

Thomas Zacharis博士-Thwmakos.xyz!
最新的博士学位在数学领域毕业,专门研究动态系统,将ad的分析技能与强大的编程背景相结合。已验证的能力能够解决复杂问题,创新解决方案并应用数学概念在不同领域,寻求利用数学专业知识和编程能力的挑战地位。
ch4:线性和非线性系统
为了进行控制系统的分析和设计,必须使用基本物理定律(例如,牛顿 - 欧拉(Newton-Euuler)的机械系统法律和柯尔乔夫(Kirchhoff)的电气系统定律,使用数学上的数学对动态系统(即机械,电气,热,经济,生物学等)进行数学建模。

分数网络神经系统 - NSF PAR
在过去的 20 年里,神经技术取得了长足的进步。然而,我们距离实现这些技术的商业化还有很长的路要走,因为我们缺乏一个统一的框架来研究将硬件、软件和神经系统结合在一起的网络神经系统 (CNS)。动态系统在开发这些技术方面发挥着关键作用,因为它们可以捕捉大脑的不同方面并深入了解它们的功能。越来越多的证据表明,分数阶动态系统在神经系统建模方面具有优势,因为它们具有紧凑的表示形式和捕捉神经行为中表现出的长程记忆的准确性。在这篇简短的综述中,我们概述了分数阶 CNS,其中包括 CNS 背景下的分数阶系统。特别是,我们介绍了分析和综合分数阶 CNS 所需的基本定义,包括系统识别、状态估计和闭环控制。此外,我们还提供了一些 CNS 背景下的应用的说明,并提出了一些未来可能的研究方向。这三个领域的进步对于开发下一代 CNS 至关重要,最终将改善人们的生活质量。
升级深空网络全球架构
美国宇航局喷气推进实验室是一家世界知名的机构,以其在深空网络上的工作而闻名,该网络负责处理行星际航天器任务,并将遥测数据与太空平台和地面跟踪站连接起来。先进且高度可靠的架构对其工作至关重要。动态系统一直是 JPL 的长期合作伙伴,也是该实验室成功不可或缺的一部分。

离散动态系统的数字孪生
本文采用离散阻尼动态系统来研究数字孪生这一新兴概念。动态系统在工程和科学领域中得到了很好的理解,并且代表了一个熟悉且方便的平台,可用于探索数字孪生设计的各个方面。目的是创建一个可用于与航空航天、电气、机械和计算领域相关的工程科学的框架。物理系统的虚拟模型表示为两个时间尺度的微分方程,使用慢时间的概念将系统特性的演变与瞬时时间分开。分别和一起考虑了涉及刚度变化和质量变化的情况。假设通过放置在物理系统上的传感器来测量阻尼固有频率和时间响应。研究了数字孪生传感器测量中的误差和采样率降低问题。数字孪生通过闭式表达式表示为解析解,并通过模拟得出传感器误差的影响。本文总结了本文介绍的几个关键概念,并提出了未来迫切需要研究的想法。当前的工作摆脱了文献中普遍存在的对数字孪生的定性描述,可以作为基准解决方案来验证实验动态系统的数字孪生及其实现

混合状态估计:将物理信息的神经网络与动态系统的自适应UKF整合
摘要:在本文中,我们通过将物理知识的神经网络(PINN)与自适应的无气味卡尔曼过滤器(UKF)相结合,提出了一种新型的动态系统估计方法。认识到传统状态估计方法的局限性,我们通过混合损失功能和蒙特卡洛辍学来完善Pinn结构,以增强不确定性估计。使用自适应噪声协方差机制增强了无味的卡尔曼滤波器,并将模型参数纳入状态矢量以提高适应性。我们通过将增强的PINN与UKF集成为无缝的状态预测管道,进一步验证了该混合动力框架,这表明准确性和鲁棒性有了显着提高。我们的实验结果表明,位置和速度跟踪的状态估计保真度明显增强,并通过贝叶斯推理和蒙特卡洛辍学的不确定性定量支持。我们进一步扩展了对双摆系统的模拟并进行了评估,并在四轮驱动器无人机上进行了状态估计。这种综合解决方案有望推进动态系统估计中的最新解决方案,从而在控制理论,机器学习和数值优化域中提供无与伦比的性能。

Alessandro Rizzo – 简历
2002–2015 巴里理工大学自动控制专业全职助理教授。研究领域为基于模型和数据驱动的优化与控制、复杂网络与系统、机电一体化、机器人技术。他在本科和研究生课程中教授动态系统、控制和机器人技术领域的多门课程。 1999–2002 墨西拿大学工业机器人学合同教授。