XiaoMi-AI文件搜索系统
World File Search System地面车辆
军事标准 881D - 国防工业协会
• 附录 G – 地面车辆系统没有改变,除了附录的标题(反映系统的当前描述)和 WBS 的构建方式。先前的 WBS 定义是按合同采购的主导车辆和变体车辆的顺序列表构建的。MIL-STD 881D 中的更改现在反映了 WBS 的构建为领导者-追随者格式。此更改将主导车辆定义为合同的通用车辆,而变体反映了主导车辆中未包含的独特元素。

Trabajo FindeMáster-Riuma校长
滑动是一种运动系统,其特征是独立驾驶地面车辆的平行胎面。转弯需要向每个胎面命令不同的旋转速度,这激发了内部胎面在转弯中刹车的外部胎面,相反,该胎面被外部拖动。因此,外胎面滑动,即,它的进展要小于其旋转速度给出的位移,并且内部滑动,即它的旋转速度比预期的要多。当车辆在现场转动时,理想情况下,胎面速度相反,两个胎面上都会滑动。仅当两个胎面都具有相同的旋转速度时,不会发生滑动或打滑(在直线运动期间)。可以使用轨道或几个机械链接的轮子建造滑动车辆的胎面。主要区别在于它们与地面的接触斑,轨道比车轮要大得多,从而导致摩擦更高,并且在不规则的地形上具有更好的牵引力[1]。每侧的车轮数通常在两到四个之间变化,是胎面的行为,距离更接近轨道。由于它的机械简单性和高可操作性,载人[2]和无人驾驶[3]地面车辆通常都采用了滑动运动。滑动移动机器人的现场应用包括检查[4],采矿[5],农业[6] [7],搜救[8]和林业[9]等。尽管如此,这种机制意味着高功率要求[10] [11],并使动态建模更加复杂[12] [13]。此外,在倾斜的地形上运行[14] [15],


车辆跟驰算法的建模与分析对燃油经济性的改善
通讯作者:Ozgenur Kavas-Torris(电子邮件:kavastorris.1@osu.edu)摘要地面车辆的连通性使车辆能够彼此共享关键车辆数据,例如车辆加速度。另一方面,使用摄像头、雷达和激光雷达等传感器,可以检测到领头车辆和主车辆之间的车内距离以及相对速度。协作自适应巡航控制 (CACC) 以地面车辆连通性和传感器信息为基础,形成具有自动跟车功能的车队。CACC 还可用于提高车队中车辆的燃油经济性和移动性能。本文介绍了 3 种用于提高 CAV 燃油经济性的跟车算法。设计了一种自适应巡航控制 (ACC) 算法作为比较的基准模型。设计了一种协作自适应巡航控制 (CACC),它使用通过 V2V 接收到的领头车辆加速度进行跟车。开发了一种生态合作式自适应巡航控制 (Eco-CACC) 模型,将前车的不稳定加速度视为需要减弱的干扰。设计了一种高级 (HL) 控制器,用于在前车驾驶员不稳定时进行决策。运行模型在环 (MIL) 和硬件在环 (HIL) 仿真,以测试这些跟车算法的燃油经济性性能。结果表明,当前车不稳定时,HL 控制器能够通过使用 CACC 和 Eco-CACC 获得平滑的速度曲线,并且比 ACC 控制器消耗更少的燃料。关键词:跟车;自适应巡航控制 (ACC);合作式自适应巡航控制 (CACC);生态合作式自适应巡航控制 (Eco-CACC);燃油经济性。
陆军未来作战系统计划和替代方案
序言 美国陆军正试图将自己从一支主要在有限地区打大规模持久战的部队转变为一支能够对世界任何地方的危机作出快速反应的部队。为了使其作战单位更加灵活多变,美国陆军正计划用更新、更轻的系统替换其笨重、老化的装甲战车,希望这些系统能够像它们所替换的车辆一样具有杀伤力和生存能力。未来作战系统 (FCS) 计划将开发和采购几种类型的有人驾驶车辆以及无人驾驶的空中和地面车辆、导弹发射器和通信链路。
征文:截止日期延长至 1 月 10 日
先进材料与工艺 辅助动力装置 电池(一次和二次、熔盐) 电池电解质和接口 电池安全/质量/测试 电容器和超级电容器 电源架构的数字工程 新兴电源与电力技术 能量转换(核能、太阳能、电化学、机电等) 燃料电池、燃料处理和储存 地面车辆混合动力和电气化 混合动力系统 微电网、用于安装弹性的大规模储能 电源建模和仿真(包括环境影响) 平台电源系统 电源管理、BMS、配电 供应链弹性 热管理 战术充电 不间断电源
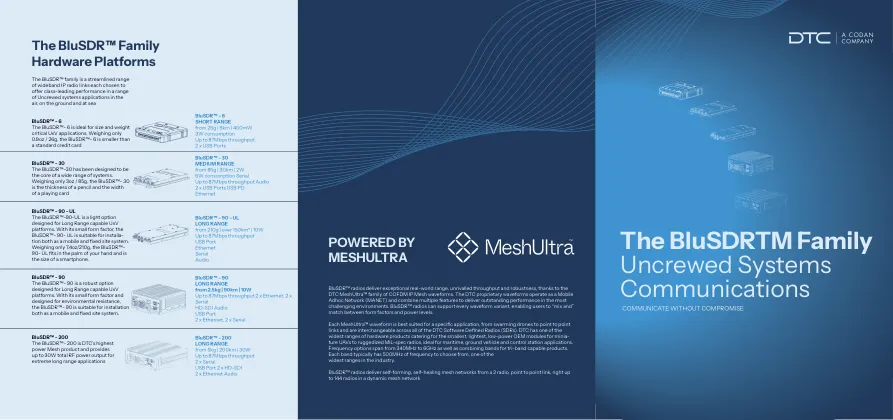
Blusdrtm家族未蛋式的系统通信
每个Meshultra™波形最适合于指定应用程序,从蜂拥而至的无人机到点链路,并且可以在所有DTC软件Defi NED收音机(SDR)中互换。DTC具有最宽的硬件产品范围之一,可用于最小,最轻,最小的低功率OEM模块,用于Miniapure UAV,可耐加固的MIL-SPEC无线电,非常适合海上,地面车辆和控制站应用。频率选项范围从340MHz到6GHz,并结合了有能力的产品的带。每个频段通常有500MHz的频率可供选择,这是行业中最广泛的范围之一。
RobotEye 技术入门 - Ocular Robotics
对于除持续“全场”扫描之外的所有用例,孔径加速能力都至关重要。对于涉及稳定、跟踪、测绘、瞄准等许多应用,快速改变方向的能力至关重要。图 2-4 显示了测试中一系列移动过程中的方位角和仰角孔径加速度分量,从图中可以看出,在测试过程中,孔径加速度经常超过 60,000°/s 2 。实际上,这种加速能力提供了其他方法无法实现的响应能力,使从高度不稳定的平台(例如在崎岖地形上快速移动的地面车辆和小型水面舰艇)获得稳定视觉成为可能,实现无延迟远程呈现、多目标跟踪等。
RobotEye 技术入门 - Ocular Robotics
对于除持续“全场”扫描之外的所有用例,孔径加速能力都至关重要。对于涉及稳定、跟踪、测绘、瞄准等许多应用,快速改变方向的能力至关重要。图 2-4 显示了测试中一系列移动过程中的方位角和仰角孔径加速度分量,从图中可以看出,在测试过程中,孔径加速度经常超过 60,000°/s 2 。实际上,这种加速能力提供了其他方法无法实现的响应能力,使从高度不稳定的平台(例如在崎岖地形上快速移动的地面车辆和小型水面舰艇)获得稳定视觉成为可能,实现无延迟远程呈现、多目标跟踪等。
RobotEye 技术入门 - Ocular Robotics
对于除持续“全场”扫描之外的所有用例,孔径加速能力都至关重要。对于涉及稳定、跟踪、测绘、瞄准等许多应用,快速改变方向的能力至关重要。图 2-4 显示了测试中一系列移动过程中的方位角和仰角孔径加速度分量,从图中可以看出,在测试过程中,孔径加速度经常超过 60,000°/s 2 。实际上,这种加速能力提供了其他方法无法实现的响应能力,使从高度不稳定的平台(例如在崎岖地形上快速移动的地面车辆和小型水面舰艇)获得稳定视觉成为可能,实现无延迟远程呈现、多目标跟踪等。