XiaoMi-AI文件搜索系统
World File Search System声纳浮标

不规则声呐浮标模式的设计和性能...
摘要 - 冷战期间开发了最佳单基地声纳浮标场模式,用于深而均匀的海底环境,其中简单的中值检测范围可用于定义声纳浮标之间有用的固定间距。然而,当前经常进行作战的沿海环境中的海洋和声学条件非常复杂且动态,以至于空间和时间的变化破坏了与传统战术搜索概念相关的同质假设。已经开展了多项研究工作来设计更好的被动和单基地主动声纳浮标位置,但其中大多数是评估算法,而不是真正的规划算法。一种不同的算法方法已成功开发并最初应用于单基地移动传感器,该方法从一组随机的传感器位置开始,然后使用遗传算法找到近似最优解。遗传算法解决方案是非标准搜索路径,可适应复杂的海洋学、可变的底部特性和假定的目标战术 [D.P.Kierstead 和 D.R.DelBalzo,《军事运筹学杂志》(2003 年 3 月/4 月)]。随后开发了一种新功能,用于优化复杂沿海环境中多静态主动声纳浮标的位置(纬度、经度和深度)和 ping 时间。这些算法称为 SCOUT(传感器协调以实现最佳利用和战术)。SCOUT 包含对移动传感器遗传算法方法的两项重大修改,以解释双静态和多静态声纳浮标场,其中每个接收器都能够观察来自每个源的数据。第一个修改是在结构上,引入了一个新的染色体来描述战术计划。每个声纳浮标都有一个基因,由一个位置、一个有序的部署序列和一组 ping 时间组成。新染色体中的位置和时间独立变异,并以不规则的模式和非连续的 ping 序列为特征。第二个修改是在检测建模上,引入了一种新的双基地检测模型。它允许相干和非相干处理的组合。对于这项工作,我们假设可以同时监控所有声纳浮标。本文讨论了现实环境中的新染色体结构和模拟结果。结果表明:a) SCOUT 可以有效地将多基地传感器场适应SCOUT 算法是我们之前的遗传算法工作的扩展,据我们所知,它们是唯一从头开始设计复杂环境中多静态主动声纳浮标位置的解决方案,而不是推荐一般的努力分配或简单地评估具有不同参数的标准模式。

声呐浮标 - BAE 系统公司
目前制造的声纳浮标严重影响小型或中型无人机的射程和续航能力,并影响梅林直升机的性能。为了解决这个问题,国防科技实验室最近委托开展了一项研究,研究声纳浮标小型化的潜力。这项工作的第一阶段将量化这种小型化对性能的影响,并提供高级设计选项。预计的第二阶段将推进任何低 TRL 方面并生产原型元素以供演示。
主题:N101-014 SeaLandAire Technologies, Inc. - 海军 STP
高增益速度传感器阵列 SeaLandAire Technologies 专门从事广泛应用领域先进工程解决方案的快速开发,目前正在开发数字 DIFAR 垂直线阵列 (DDVLA) 声纳浮标,以补充美国海军新兴的低频声纳探测技术。该浮标采用垂直线高增益微型定向探测器阵列,在嘈杂环境中实现高信噪比。DDVLA 将用于基于飞机的反潜战 (ASW) 行动,作为不断壮大的低频声纳浮标系统系列的一部分。声学系统的初始原型显示出良好的效果,并充分利用了 SeaLandAire 在声纳浮标开发方面的经验。第二阶段的最终目标是拥有经过实地验证的浮标系统设计,然后在过渡合作伙伴的帮助下将其转移到生产和认证阶段。
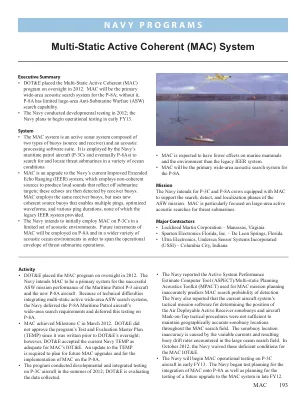
多静态主动相干 (MAC) 系统
• 海军报告称,用于 MAC 任务规划的主动系统性能评估计算机工具 (ASPECT)/多静态规划声学工具包 (MPACT) 无法准确预测 MAC 搜索的探测概率。海军还报告称,当前飞机系统的战术任务软件用于确定空中部署主动接收器声纳浮标的位置,而飞机顶部标记战术程序不足以在整个 MAC 搜索领域保持声纳浮标的地理准确位置。声纳浮标位置不准确是由大型海洋搜索领域遇到的可变电流和由此产生的浮标漂移率造成的。2012 年 10 月,海军放弃了 MAC IOT&E 的这些缺陷条件。• 海军将于 2013 财年年初开始在 P-3C 飞机上进行 MAC 操作测试。海军于 2012 财年末开始测试计划将 MAC 集成到 P-8A 上,并计划测试 MAC 系统的未来升级。
海军联合声呐浮标 N88-NTSP-A-50-8910C/A ...
E. 开发测试和操作测试。BT、DIFAR、LOFAR、DICASS、VLAD、DLC、EER 和 IEER 声纳浮标均已完成开发测试 (DT) 和操作测试 (OT)。ADAR 已完成系统有效性、ASW 平台和声纳浮标互操作性以及物流和性能规范合规性的 DT。ADAR DT-I 由马里兰州帕塔克森特河空中测试和评估中队一 (VX-1) 于 97 财政年度 (FY0) 成功完成。马里兰州帕塔克森特河海军航空作战中心飞机部 (NAWCAD) 从 98 财政年度第一季度到第四季度使用 S-3B 飞机(当时唯一能够进行测试的飞机)和声源与生产代表 ADAR 声纳浮标配合使用成功完成了 ADAR DT-II。 OT-II 由 VX-1 于 1998 年 10 月开始执行,并于 1998 年 12 月成功完成。

声学海洋浮标遥测系统 - SiPLAB
空中 RaN 和水下 AcN,从而形成一个无缝网络。此外,“先进”声纳浮标可用作获取数据预处理和数据融合的中间步骤,通过此步骤可实现数据缩减。此类数据缩减意味着更短的数据上传时间,这是在敌对地区执行 REA 操作的重要先决条件,因为空中 RaN 节点的长期存在可能会影响任务成功。敌对地区操作表明,“先进”声纳浮标领域必须集成一个可随时添加或抑制节点的网络,即使使用单个“先进”声纳浮标也能执行精简的操作。声学海洋浮标 (AOB) 遥测系统希望满足“先进”声纳浮标的特性。它通过使用标准“IEEE 802.11”WLAN配置集成空中RaN,并使用水听器阵列和声源集成水下AcN。第一个AOB原型在2003年[3]和2004年[4]的海上快速环境评估海上试验中进行了测试。AOB的当前版本于2005年9月15日至10月2日在美国夏威夷考艾岛附近的MakaiEx海上试验中进行了测试,该试验是美国圣地亚哥HLS Research Inc推动的高频计划的背景下进行的。下面将描述AOB设计,讨论主要系统特性,介绍MakayEx AOB工程测试并指出未来的发展。系统设计 AOB 的物理特性,包括高度(1.2m)、直径(16cm)、重量(40kg)和自主性(12 小时),与标准声纳浮标的物理特性相似。但是,AOB 具有高级功能,包括:独立或网络操作;本地数据存储;专用信号处理;GPS 定时和定位;实时数据传输和中继。本节简要介绍 AOB 硬件和软件,并给出“基站”——空中 RaN 节点的主要特性。
声学海洋浮标遥测系统 - SiPLAB
空中 RaN 和水下 AcN,从而形成一个无缝网络。此外,“先进”声纳浮标可用作获取数据预处理和数据融合的中间步骤,通过此步骤可实现数据缩减。这种数据缩减意味着更短的数据上传时间,这是在敌对地区执行 REA 操作的重要前提,因为空中 RaN 节点的长期存在可能会影响任务的成功。敌对地区行动表明,“先进”声纳浮标领域必须集成一个可以随时添加或抑制节点的网络,即使使用单个“先进”声纳浮标也能执行精简的操作。声学海洋浮标 (AOB) 遥测系统希望满足“先进”声纳浮标的特性。它使用标准“IEEE 802.11”WLAN 配置集成空中 RaN,并使用水听器阵列和声源集成水下 AcN。第一台 AOB 原型机在 2003 年 [3] 和 2004 年 [4] 的海事快速环境评估海上试验中进行了测试。2005 年 9 月 15 日至 10 月 2 日,在美国夏威夷考艾岛附近的 MakaiEx 海上试验中对 AOB 的现行版本进行了测试,此次试验是在美国圣地亚哥 HLS Research Inc 推动的高频计划的背景下进行的。下面将描述 AOB 的设计,讨论主要的系统特性,介绍 MakayEx AOB 工程测试,并指出未来的发展。系统设计 AOB 的物理特性在高度(1.2 米)、直径(16 厘米)、重量(40 公斤)和自主性(12 小时)方面与标准声纳浮标相似。然而,AOB 具有先进的功能,包括:独立或网络操作;本地数据存储;专用信号处理;GPS 授时和定位;实时数据传输和中继。本节简要介绍了AOB硬件和软件,并给出了“基站”(空中RaN节点)的主要特性。

老狗,新把戏 - ATL2 更新.pdf - Alix Valenti 博士
alix-valenti.com › 上传 PDF 1 Sadang,一种与声纳浮标相关的数据处理系统。“当前系统的问题在于,我们的声音范围。

宾夕法尼亚州立大学研究生院 ...
第 3 章 双静态条件下的散射强度 23 3.1 SSQ-53D 声纳浮标 ....................。。。24 3.1.1 声纳浮标组件。。。。。。。。。。。。。。。。。。。。.25 3.1.2 机载信号调节 ................28 3.1.3 SSQ-53D 的强度处理 ..............30 3.2 使用 SSQ-53D 测量强度 ................31 3.2.1 空气中强度 .......................32 3.2.2 水中强度 .....................37 3.3 理论散射模型 ..............。。。。。43 3.4 彭德-奥雷湖实验。。。....................46 3.4.1 实验设置 ........................46 3.4.2 数据分析程序 .......。。。。。。。。。。。。。。51

对弓头鲸的声学研究。
north-slope.org › uploads › 2022/03 PDF 声纳浮标系统.... .9-55 ... 无线电接收和录音系统。... 约 1 瓦,在 31 个标准宽带之一上传输。