XiaoMi-AI文件搜索系统
World File Search System夹子

利用 CRISPR/Cas9 对禾谷镰刀菌基因组进行意外大规模删除及其对生长和毒力的影响
摘要:禾谷镰刀菌是一种丝状真菌,是小麦和其他谷类作物赤霉病的病原体,在全球范围内造成了重大的经济损失。本研究旨在利用 CRISPR/Cas9 介导的基因缺失技术研究特定基因在禾谷镰刀菌毒力中的作用。使用 Illumina 测序来表征编辑引起的基因组变化。出乎意料的是,两个分离株中发生了 2 号染色体上 525,223 个碱基对的大规模缺失,包含超过 222 个基因。许多被删除的基因被预测与氧化还原酶活性、跨膜转运蛋白活性、水解酶活性等基本分子功能以及碳水化合物代谢和跨膜转运等生物过程有关。尽管遗传物质大量丢失,突变分离株在大多数条件下仍表现出正常的生长率和对小麦的毒性。然而,在高温和某些培养基中,生长率显著降低。此外,还进行了使用夹子浸种法、种子接种法和头点接种法的小麦接种试验。未观察到毒性的显著差异,这表明这些基因不参与感染或替代补偿途径,并允许真菌在基因组大量缺失的情况下保持致病性。
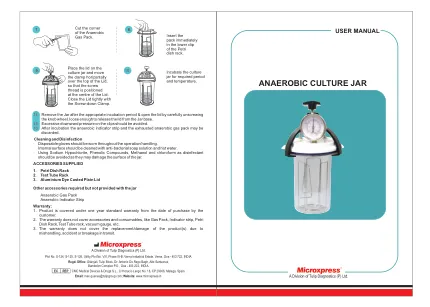
厌氧文化罐手册open.cdr
用于撤离替换技术的指示:1。将培养皿放在架子上,然后将厌氧指示条插入板架上的较小夹子中。2。将加载的机架放入聚碳酸酯罐中。3。确保正确将硅'o'环正确放在罐子上后,将装有附件的盖子放在罐子上。施加三个指夹,然后拧紧直至紧紧。4。必须将称为真空Chuck的金属配件用于疏散/替换技术,以使第一个真空降低。5。安装真空盘连接到真空线上的真空盘,以标记为“真空”并按下(不要螺钉)的阀。拧紧会损坏密封橡胶垫圈并导致Chuck泄漏。6。将系统撤离到HG中约30。7。使用后,只需立即将真空卡盘从真空阀上抬起即可断开连接。观察压力表。在此阶段将检测到罐子中的泄漏,因为真空读数不会保持恒定。8。将连接到气体供应的压力连接到罐子的压力阀上。将气体混合物运到罐子中,直到压力为零。断开压力袋。9。孵化罐子。10。孵育后,指示条应用正常的实验室废物丢弃。
Winnebago Industries 零件和配件目录
131147-01-01A 单门冰箱门,顶部旋钮,Norcold N300.9 131147-01-731 控制面板,3 通 131147-01-732 开关/选择器,4 位置 131147-01-733 火花点火器 131147-01-734 火焰计 113737-01-709 断路器 113737-01-735 恒温器燃气阀 131147-01-725 弯头,黄铜/90˚。2 PC 131147-01-726 适配器,管道 113737-01-730 安全点火阀 131147-01-728 插头/延长安全阀 131147-01-729 热电偶 131147-01-730 O 形环,安全阀 131147-01-746 燃烧器组件 131147-01-747 火花电极 131147-01-748 测压嘴 104137-06-724 冰格 125242-01-750 夹子 131147-01-701 燃气控制器 131147-01-702 控制面板组件 131147-01-704 旋钮,恒温器131147-01-723 加热器,直流 131147-01-724 加热器,交流 131147-01-721 橱柜挡板 131147-01-708 门闩 131147-01-710 铰链/橱柜-上部/RH,下部/LH 131147-01-712 金属丝架上部 131147-01-713 金属丝架下部 131147-01-714 门箱,白色 131147-01-715 滴水盘 113737-01-701 衬套-铰链 131147-01-711 门组件。(泡沫) 131147-01-742 面板固定器 (已使用 2 个) 131147-01-743 米色插头 131147-01-744 闩锁板 102621-04-703 支架弹簧,RH 白色蒸发器 102621-04-707 支架弹簧,LH 白色蒸发器 131147-01-705 冷冻室门 131147-01-735 铰链/冷冻室门,RH 131147-01-736 铰链/冷冻室门,LH 131147-01-738 弹簧销 131147-01-716 燃烧器管 131147-01-717 燃气入口管131147-01-718 接线端子 131147-01-719 手动关闭阀 131147-01-720 冷却装置-NSC 系统。包
数字模拟转换模块 AJ65VBTCU-68DAV 型用户手册
在开始安装、接线和其他工作之前,请务必从外部关闭所有阶段的电源。否则,可能会导致产品损坏或故障。请务必将 FG 引脚接地到保护接地导体。否则,可能会导致故障。确认产品的额定电压和引脚布局后,正确接线模块。否则,可能会导致火灾或故障。确保没有碎屑和电线碎片等异物进入模块。异物可能会导致火灾、故障或故障。请勿将一键连接器类型/连接器类型小型远程 I/O 单元的 I/O 用一键连接器插头意外插入模拟 I/O 用一键连接器。否则,可能会导致模块损坏。务必将未接线的一键式连接器插头安装到电源/FG 的开放式一键式连接器上。否则,可能会引起故障或误动作。将通信和电源线连接到模块时,务必将它们穿入导管或用夹子夹紧。否则,可能会因松动、移动或意外拉动电缆而损坏模块和电缆,或者因电缆连接故障而引起误动作。从模块断开通信和电源线时,请勿握住并拉动电缆部分。松开连接到模块的部分的螺钉后,断开电缆。拉动连接到模块的电缆可能会损坏模块和电缆,或者因电缆连接故障而引起误动作。

OmniHd-Scenes:用于自动驾驶的下一代多模式数据集
摘要 - 深度学习的快速进步加剧了对自动驾驶算法使用的全面数据的需求。高质量数据集对于开发有效数据驱动的自动驾驶解决方案至关重要。下一代自动驾驶数据集必须是多模式的,结合了来自高级传感器的数据,这些数据具有广泛的数据覆盖率,详细的注释和不同的场景表示形式。为了满足这一需求,我们提出了OmniHd-Scenes,这是一个大规模的多模式数据集,可提供全面的全向高清数据。OMNIHD-SCENES数据集结合了来自128束梁雷达,六个摄像机和六个4D成像雷达系统的数据,以实现完整的环境感知。数据集包含1501个夹子,每个夹子长约30秒,总计超过450K同步帧和超过585万个同步传感器数据点。我们还提出了一个新颖的4D注释管道。迄今为止,我们已经注释了200个剪辑,其中有超过514K精确的3D边界框。这些剪辑还包括静态场景元素的语义分割注释。此外,我们还引入了一条新型的自动化管道,以生成密集的占用地面真理,从而有效利用了非钥匙框架的信息。与拟议的数据集一起,我们为3D检测和语义占用预测建立了全面的评估指标,基线模型和基准。这些基准测试利用环绕摄像机和4D成像雷达来探索用于自动驾驶应用的具有成本效益的传感器解决方案。广泛的实验证明了我们的低成本传感器构型及其在不利条件下的鲁棒性的有效性。数据将在https://www.2077ai.com/omnihd-scenes上发布。
![arxiv:2308.05659V2 [CS.CV] 16 9月16日2024](/simg/3\30a46ac880935730bedbb8cdc7f572bd0c181275.webp)
arxiv:2308.05659V2 [CS.CV] 16 9月16日2024
尽管深度学习模型在监督的学习任务上表现出了令人印象深刻的表现,但在培训(源)和测试(目标)域不同时,它们通常会努力概括地概括。无监督的域适应性(DA)已成为解决此问题的流行解决方案。但是,当前的DA技术依赖于视觉主干,这可能缺乏语义丰富。尽管大规模视觉语言基础模型(如剪辑)有潜力,但其对DA的有效性尚未得到充分探索。为了打扮这个差距,我们介绍了AD-CLIP,这是一种域名迅速学习策略,旨在解决及时空间中的DA问题。我们利用夹子的冷冻视频主干来提取图像样式(域)和内容信息,我们将其应用于学习提示令牌。我们的提示是通过同时调节图像样式和内容功能的及时学习的,以域名为域不变且可将其归纳。我们在源域中使用标准监督的对比度学习,同时提出熵最小化策略以使嵌入空间中的域中的域与焦油域数据相结合。我们还考虑了一个方案,其中仅在测试过程中仅可用目标域样本,并带有任何源域数据,并提出了一个跨域样式映射网络以使幻觉域 - agnoftic to-kens。我们在三个基准DA数据集上进行的广泛实验证明了与现有文献相结合的AD-CLIP的有效性。代码可从https://github.com/mainaksingha01/ad-clip
Mitraclip™设备的设计演变
lanscaterter边缘到边缘修复(TEER)对二尖瓣反流(MR)的处理(MR)首先是根据Ottavio Alfieri教授开创的新型边缘到边缘手术修复技术在1990年代后期构想的。1998年,在得知Alfieri教授的独特手术方法后,弗雷德·圣·戈阿尔(Fred St.经过一些基本的概念证明工作和知识产权的勤奋,他们在1999年秋天创立了一家初创公司评估公司。尽管最初的TEER设备概念专注于将缝合线安装到相对的阀门1或使用导管将传单固定在一起,但2评估了早期的原型制作和测试工作,导致了洞察力,即植入式夹子(无需通过传单就不需要穿线)是一种安全和有效的方法。与创新的医师合作者合作,评估了建立和测试各种早期设备概念的工程团队,最终达到了第一个基于剪辑的TEER技术,今天被称为Mitraclip™System(Abbott)。评估继续通过其2003年的首次人类植入米特拉克利平台的早期发展,随后在欧洲获得了CE Mark的批准。3,4评估是由雅培实验室在2009年获得的。5雅培继续发展和成熟Mitraclip Teer技术和治疗,支持美国FDA在2013年获得Mitraclip系统的批准。6
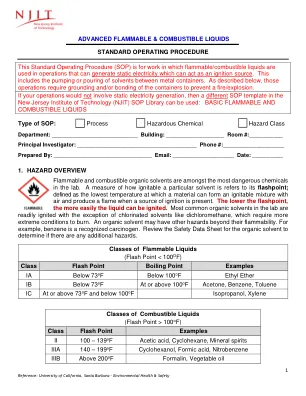
高级易燃和可燃液体
i. 实验室中的静电危害 易燃和可燃液体的流动会引起静电积聚。当电荷积聚到一定程度时,会产生火花,并可能导致火灾或爆炸。发生这种情况的可能性取决于液体的导电性、闪点和产生静电的能力。 当液体从一个金属容器转移到另一个金属容器时,会产生静电。液体在倾倒、泵送或搅拌过程中与其他材料接触时会产生静电。这种静电的积聚会在溶剂流出容器的地方形成火花。这可能会导致火灾或爆炸。 ii. 避免静电的程序 为避免可能引起火花的静电积聚,必须将金属容器接地,尤其是容量较大的容器,例如 55 加仑桶或 5 加仑容器。接地消除了两个容器之间的电势,因此消除了产生火花的可能性。接地线连接到两个导电物体,如下图所示。接地消除了导电物体和地面之间的静电势电荷差。接地是通过将导电物体直接连接到地面来实现的,通常使用冷水铜管、建筑钢材或接地母线/排。接地和接地需要良好的电气连接。清除任何污垢、油漆或铁锈,确保金属与金属接触。接地线和接地线和夹子有多种款式和长度。

扩散反馈有助于剪辑查看更好的
对比性语言图像预训练(剪辑),它擅长于跨领域和模态提取开放世界的表示,已成为各种愿景和多模式任务的基础。然而,最近的研究表明,剪辑具有严重的视觉缺陷,例如几乎无法区分方向,数量,颜色,结构等。这些视觉缺点还限制了剪辑上构建的多模式大语模型(MLLM)的感知能力。主要原因可能是由于缺乏文本的独特性和图像的多样性,用于训练剪辑的图像文本对固有地存在偏差。在这项工作中,我们为剪辑模型提供了一种简单的培训方法,该方法在很大程度上通过自我监督的扩散过程克服了其视觉缺陷。我们介绍了Diva,该Diva使用Di Flupusion模型作为vrip ssistant的v。具体来说,Diva利用文本到图像扩散模型的生成反馈来优化剪辑表示,仅具有图像(没有相应的文本)。我们证明,Diva提高了夹在具有挑战性的MMVP-VLM基准上的表现,该基准在很大程度上评估了细粒度的视觉能力(例如g。,3-7%↑),并在多模式理解和分割任务上增强了MLLM和视觉模型的性能。对29个图像分类和检索基准测试的广泛评估证实,我们的框架保留了夹子强的零击功能。该代码将在https://github.com/baaivision/diva上找到。

推进AI驱动的医疗图像合成
摘要MEDVQA-GI挑战挑战解决了AI驱动的文本对象生成模型在医学诊断中的集成,旨在通过合成图像生成来增强诊断能力。现有方法主要集中于静态图像分析,并且缺乏文本描述中医学图像的动态生成。本研究打算通过引入基于微调生成模型的新方法来部分缩小这一差距,以从文本描述中生成动态,可扩展和精确的图像。尤其是,我们的系统集成了微调的稳定扩散和Dreambooth模型,以及低级适应(LORA),以生成高保真的医学图像。问题是两个子任务,即:图像合成(IS)和最佳提示生产(OPG)。前者通过口头提示创建医学图像,而后者提供了在指定类别中产生高质量图像的提示。这项研究强调了传统医学图像生成方法的局限性,例如手绘,限制数据集,静态程序和通用模型。我们的评估措施表明,稳定的扩散在产生高质量,多样化的图像方面超过了夹子和Dreambooth + Lora。具体来说,稳定的扩散的限制距离(FID)得分最低(单中心为0.099,多中心为0.064,合并为0.067),表明图像质量更高。此外,它的平均成立得分最高(所有数据集中为2.327),表明了异常的多样性和质量。这进展了AI驱动的医疗诊断领域。未来的研究将集中于模型炼油,数据集扩展和道德考虑,以有效地将这些进步实施到临床实践中。