XiaoMi-AI文件搜索系统
World File Search System定位的

精确雷达定位的神经误差协方差估计
自动驾驶汽车由于技术进步及其改变转移的潜力而引起了极大的关注。该领域中的一个关键挑战是精确的定位,尤其是在基于激光雷达的地图匹配中,由于数据中的退化,这很容易出现错误。大多数传感器融合技术,例如卡尔曼过滤器,都依赖于每个传感器的准确误差协方差估计来提高定位精度。但是,获得地图匹配的可靠协方差值仍然是一项复杂的任务。为了应对这一挑战,我们提出了一个基于神经网络的框架,用于预测LIDAR地图匹配中的本地化错误协方差。为了实现这一目标,我们引入了一种专门设计用于错误协方差估计的新型数据集生成方法。在使用Kalman滤波器的评估中,我们实现了2 cm的定位准确性,这是该域的显着增强。

Android智能手机单点定位的开源优化方法
摘要如今,芯片规模的全球导航卫星系统(GNSS)接收器在智能手机中无处不在。在智能手机GNSS接收器中,实施最小的(LS)或Kalman滤波器(KF)以估算位置。旨在提高智能手机GNSS位置精度,我们建议使用比传统方法(即LS和KF)更多的历史信息进行平滑的方法。更多的过去状态被视为未知数,并且构建了成本函数以优化这些状态。使用Google的开源智能手机数据集用于测试提出的方法。实验结果表明,所提出的方法在位置误差中的其他常规方法优于其他常规方法。此外,我们打开源代码。我们期望在智能手机GNSS位置平滑应用程序中实现的优化方法可以是一个说明性的示例,可以清楚地引入这种优化方法和其实现的参考,这可能会激发GNSS中其他一些有意义且令人兴奋的应用程序。
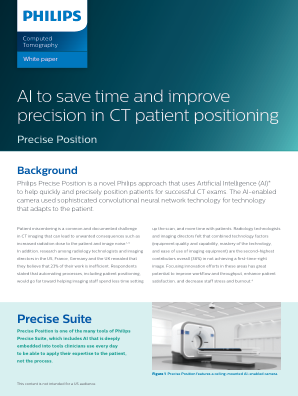
AI 可节省时间并提高 CT 患者定位的精度
* 我们接受以下 AI 的正式定义(来源:HLEG 定义 AI)。人工智能 (AI) 系统是由人类设计的软件(也可能是硬件)系统,给定一个复杂目标,通过数据采集感知其环境、解释收集的结构化或非结构化数据、推理知识或处理从这些数据中得出的信息并决定为实现给定目标而采取的最佳行动,在物理或数字维度上采取行动。AI 系统可以使用符号规则或学习数字模型,它们还可以通过分析环境如何受到其先前行为的影响来调整其行为。作为一门科学学科,AI 包括多种方法和技术,例如机器学习(其中深度学习和强化学习是具体示例)、机器推理(包括规划、调度、知识表示和推理、搜索和优化)和机器人技术(包括控制、感知、传感器和执行器,以及将所有其他技术集成到网络物理系统中)。
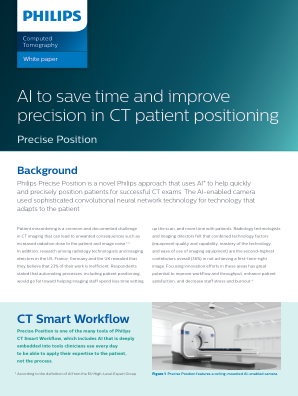
AI 可节省时间并提高 CT 患者定位的精度
6.疾病控制和预防中心。2019 年冠状病毒病 (COVID-19) 大流行期间针对医护人员的临时感染预防和控制建议。2021 年 2 月 23 日更新。 https://www.cdc.gov/coronavirus/2019-ncov/hcp/infection-control-recommendations。html。2021 年 3 月 5 日访问。
用于定位的公共通道中的多代币流通......
借助无人机技术的小型化和成本降低,可以实现由多架小型无人机组成的系统,而不是仅使用一架大型无人机。虽然多无人机系统在许多应用领域可以更高效地运行,但它也存在一些局限性。通信是这些系统最重要的限制之一,而飞行自组织网络(FANET)是在没有预装基础设施的情况下有效的解决方案。在 FANET 中,无人机需要知道彼此的位置信息以确保无碰撞协调。因此,无人机之间共享位置信息在 FANET 中发挥着重要作用。基于令牌的方法是用于位置信息共享的重要方法之一。在这种方法中,包含无人机坐标的令牌在无人机之间流通。因此,无人机通过流通的令牌知道彼此的位置。然而,尤其是在无人机群中,令牌的流通需要更长的时间,并且可能导致更高的错误率。使用多个令牌可以减少多无人机系统中的平均流通时间和位置信息错误率。在现有的多令牌研究中,假设每个令牌使用单独的通信通道来解决令牌碰撞问题。本文提出了一种新的基于多令牌的多无人机系统位置信息共享系统。在这个系统中,虽然只有一个公共通道用于令牌流通,但另一个通道用于控制数据包,以最大限度地减少令牌碰撞

青少年冰球运动中冰面定位的物体检测
摘要 运动相关的脑损伤是一个紧迫的问题,特别是在冰球等高强度运动中,撞击速度在确定头部撞击程度和随后的受伤风险方面起着重要作用。然而,现有的测量撞击速度的方法,如 GPS 跟踪和手动视频分析,成本高昂,难以使用,尤其是对于青少年联赛而言。本研究介绍了一种使用计算机视觉从 2D 视频中确定球员速度的自动化、经济高效的方法。第一步是定位场地,通过一种新方法使用 YOLOv5 检测冰面上的特定地标。凭借超过 9,900 张带注释图像的数据集,YOLOv5 表现出色,在 80% 的置信水平下实现了 0.99 的 F1 分数和精确召回率,在 IoU 阈值为 0.5 和 0.5:0.95 时分别实现了 98.5% 和 64.5% 的 mAP 分数。通过每帧检测至少四个地标,计算单应性矩阵以获得自上而下的视图,从而完成定位过程。这种方法实现了 0.96 的平均 IoU,验证了其在现场定位中的准确性,并展示了其在提高冰球撞击速度测量的可及性和成本效益方面的潜力。

改善应变定位的GASE单光子发射器...
该手稿由UT-Battelle,LLC部分撰写,根据与美国能源部(DOE)合同DE-AC05- 00OR22725。美国政府保留和出版商,通过接受该文章的出版物,承认美国政府保留了非判定,有偿,不可撤销的,全球范围内的许可,以出版或复制本手稿的已发表形式,或允许其他人这样做,以实现美国政府的目的。DOE将根据DOE公共访问计划(http://energy.gov/downloads/doe-public-access-plan),将公开访问联邦赞助研究结果。

用于药物重新定位的非负张量分解
计算药物重新定位旨在确定现有药物在治疗其并非针对的疾病方面的潜在应用。这种方法可以大大加快传统的药物发现过程,减少药物开发所需的时间和成本。张量分解使我们能够整合多种药物和疾病相关数据,以提高预测性能。在本研究中,提出了一种用于药物重新定位的非负张量分解 NTD-DR。为了捕捉药物-靶标、药物-疾病和靶标-疾病网络中的隐藏信息,NTD-DR 使用这些成对关联构建一个表示药物-靶标-疾病三重态关联的三维张量,并将它们与药物、靶标和疾病的相似性信息相结合以进行预测。我们将 NTD-DR 与最近的最先进方法在受试者工作特征 (ROC) 曲线下面积 (AUC) 和精确度和召回率曲线下面积 (AUPR) 方面进行了比较,发现我们的方法优于竞争方法。此外,五种疾病的案例研究也证实了 NTD-DR 预测的可靠性。我们提出的方法在前 50 个预测中识别出比其他方法更多的已知关联。此外,NTD-DR 识别的新关联通过文献分析得到验证。

RatHat:一种可自我定位的可打印大脑植入系统
几十年来,神经科学家处理立体定位方法的方式并没有发生重大变化。在这里,我们提出了一种新的立体定位方法,它为传统的 U 型框架立体定位装置提供了一种替代方法,降低了成本、缩短了手术时间并提高了可重复性。RatHat 脑植入系统是一种 3D 打印的大鼠立体定位装置,在手术前制作并适合颅骨形状。RatHat 结构直接植入大脑,无需在手术过程中进行头部调平或坐标映射。RatHat 可以与传统的 U 型框架立体定位装置结合使用,但不需要使用微操作器即可成功植入。每个 RatHat 包含几个主要组件,包括用于安装颅内组件的植入物、用于定位钻孔位置的手术模板以及用于防止撞击和碎片损坏的保护帽。每个组件都有独特的功能,可以一起使用或单独使用。我们在四个不同的原理验证实验中证明了 RatHat 的可行性:(1) 三极套管装置、(2) 光极电极组件、(3) 固定电极阵列和 (4) 四极超速驱动器。植入成功、耐用且使用寿命长(长达九个月)。RatHat 打印文件易于创建,可在计算机辅助设计 (CAD) 软件中修改以用于各种应用,并且易于共享,有助于实现开放科学目标和复制。RatHat 已在我们的实验室中适应多种实验范式,应该是一种在啮齿动物中进行立体定位植入手术的有用新方法。
适应性:带有触觉重新定位的形状更换道具
我们提出了一种新颖的“混合”活动/被动触觉设备,可以改变形状,以作为VR中一系列虚拟对象的代理。我们将适应性与触觉重新定位一起重定向用户的手重定向,以提供仅使用单个道具触及的几个虚拟对象的触觉反馈。为了评估适应性通过触觉重新定位的有效性,我们进行了一个受试者内实验,采用对接任务将适应性与非匹配的代理对象(即造泡沫球)进行比较和匹配的形状支柱进行比较。在我们的研究中,Adaptic坐在用户前面的桌子上,并改变了grasps之间的形状,为放置在不同虚拟位置中的各种虚拟对象提供匹配的触觉反馈。结果表明幻觉令人信服:用户认为他们正在使用单个自适应设备在不同的虚拟位置操纵几个虚拟对象。与适应性的对接性能(综合时间和精度)与没有触觉重新定位的道具相当。