XiaoMi-AI文件搜索系统
World File Search System定位精度
串行机械臂关节特性测量...
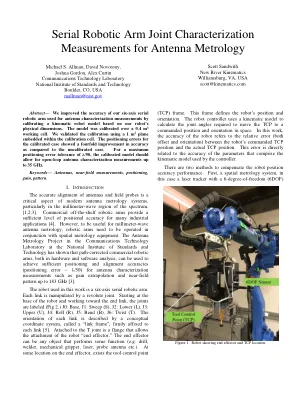
这是现代天线计量系统的一个关键方面,特别是在毫米波频谱区域 [1,2,3]。商用现货机械臂可为许多工业应用提供足够的定位精度 [4]。然而,要用于毫米波天线计量,机械臂需要与空间计量设备配合使用。美国国家标准与技术研究所通信技术实验室的天线计量项目表明,路径校正商用机械臂(无论是在硬件分析中还是在软件分析中)可用于实现足够的定位和对准精度(定位误差 ~λ/50),用于天线特性测量,例如增益外推和高达 183 GHz 的近场方向图 [3]。

GOA-GDOP在飞机协同检测中的应用
定位精度。目前定位精度分析方法主要有几何精度因子(GDOP)、克拉美-罗下限(CRLB)、圆概率误差(CEP)等。本质上,GDOP可以看作是最小二乘估计,而CRLB则是最大似然估计。当系统为线性,高噪声为高斯独立白噪声时,二者等价,但在非线性系统中,二者会产生一定的差异。这是由于GDOP忽略了误差协方差对角元素,对传感器几何位置的敏感性高于CRLB,CRLB是作为传感器目标几何不确定性的分析工具,而CRLB是基于传感器对目标观测的统计性能评估工具
GOA-GDOP在飞机协同检测中的应用
衡量定位精度需要一定的参数作为参考,目前定位精度分析方法主要有几何精度因子(GDOP)、克拉美-罗下限(CRLB)、圆概率误差(CEP)等。本质上,GDOP可以看作是最小二乘估计,而CRLB则是最大似然估计。当系统为线性,高噪声为高斯独立白噪声时,二者等价,但在非线性系统中,二者会产生一定的差异。这是由于GDOP忽略了误差协方差对角元素,对传感器几何位置的敏感性高于CRLB,CRLB是作为传感器目标几何不确定性的分析工具,而CRLB是基于传感器对目标观测的统计性能评估工具
全球定位系统 (GPS) 的经济效益
9-1. 海运业定位精度用途和需求 ...................................................................................................... 9-4 9-2. 精确度和准确度性能 ...................................................................................................................... 9-5 9-3. 估值方法 ................................................................................................................................ 9-6 9-4. 目标人群和访谈中涉及的关键问题 ...................................................................................... 9-7 9-5. 按目标人群划分的访谈数量 ...................................................................................................... 9-8 9-6. GPS 中断 30 天的经济影响摘要(百万) ...................................................................................... 9-11 9-7. 捕捞技术和物种示例 ............................................................................................................. 9-11 9-8. 2016 年按月捕捞收入 ............................................................................................................. 9-16 9-9. GPS 中断 30 天的定量影响 ............................................................................................................. 9-16 9-10.数据点和来源................................................................................................................ 9-19 9-11. 休闲划船价值a.............................................................................................................. 9-19 9-12. 休闲划船的价值

精密谐波齿轮 RT1-T
特点 更高性能和更高灵敏度 当今的许多应用都采用了涉及使用协作机器人的自动化解决方案。机器人和自动化解决方案在克服未来挑战方面发挥着不可或缺的作用,尤其是在工业自动化领域,但也包括物流、医疗技术和农业应用等其他领域。舍弗勒通过集成传感器的精密谐波齿轮创新解决方案支持最终用户不断提高性能并同时用于敏感应用。当在协作机器人的每个关节上使用带传感器的精密谐波齿轮 RT1-T 并与机器人制造商使用控制技术的振动补偿相结合时,该解决方案可支持更好的动态性能。因此,通过主动补偿振动,可以在保持协作机器人定位精度的同时实现更高的速度。
中国部署北斗系统发射电力和......
中国于 1994 年开始通过其领土上的 BDS-1 实验卫星系统开发本土导航系统北斗 (BDS)。在欧盟-中国合作的大量先前帮助下,北京于 2017 年启动了该系统的第三个版本 BDS-3。2018 年,中国卫星导航办公室主任冉承其宣布北斗已将其服务扩展到全球。BDS-3 于 2020 年 8 月宣布全面投入运营,由 27 颗中地球轨道 (MEO) 卫星、5 颗地球静止卫星 (GEO) 和 3 颗倾斜地球同步轨道 (IGSO) 卫星组成。根据北斗官方声明,目前公共用途的全球定位精度优于 10 米,并在亚太地区性能增强。加密定位精度估计高达 0.1 米/秒。更高精度是许可服务,仅限于授权用户和军事用户。

使用激光干涉仪校准转台的位置精度和重复性
摘要。本文介绍了如何根据 ISO-230-2《数控轴定位精度和重复性测定》标准 [1] 使用激光干涉仪对多轴转台进行位置精度校准。高精度多轴转台经常用于国防和航空航天工业。这些转台用于控制收集位置数据的设备。因此,应定期校准转台以保持在规格性能标准之间。转台旋转轴位置的校准通常使用自准直仪和多面多边形系统进行。多边形和自准直仪与转台轴的对准可能在时间要求和硬件设置方面存在困难。激光干涉仪可用作定期校准轴位置和重复性的替代方法,具有时间要求和易用性方面的优势。本研究将对±3角秒的水平轴进行位置精度和重复性校准,并对结果进行评估。
四图表 - 海军蓝 STP
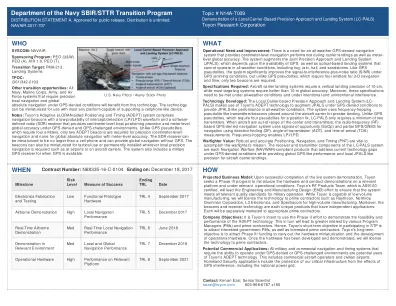
注释:Toyon 的自适应 eLORAN 辅助定位和授时 (ADEPT) 系统包括具有低截获/检测概率 (LPI/LPD) 波形的导航信标和软件定义无线电 (SDR) 接收器,该接收器可在 GPS 拒绝和 GPS 挑战环境下提供厘米级本地定位精度和米级全球精度。与需要四个发射器的 GPS 伪卫星不同,精确(厘米级)导航只需要两个 ADEPT 信标,而米级精度的全球绝对导航则不需要。SDR 接收器可以缩小到不超过手机大小,并且可以在没有 GPS 的情况下提供全球导航。信标还可以缩小以用于战术用途或永久安装在需要本地精确导航的任何地方,例如机场或航空母舰上。该系统还包括一个军用 GPS 接收器,用于 GPS 可用时。
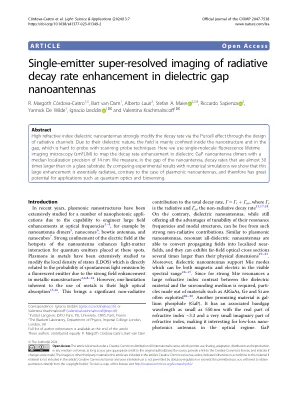
辐射衰减率提高介电间隙纳米annoantennas
抽象的高折射率介电介电纳米antennas通过辐射通道的设计通过purcell效应强烈修改衰减速率。由于其介电性质,该领域主要是在纳米结构内和间隙内进行的,这很难使用扫描探针技术进行探测。在这里,我们使用单分子荧光寿命成像显微镜(SMFLIM)来绘制介质间隙纳米二二聚体的衰减速率增强,中位定位精度为14 nm。,我们在纳米坦纳(Nanoantenna)的间隙中测量的衰减速率几乎是玻璃基板上的30倍。通过将实验结果与数值模拟进行比较,我们表明,与等离激元纳米ant的情况相反,这种较大的增强本质上是辐射的,因此在量子光学和生物效率等应用中具有巨大的潜力。
NEO-6 u-blox 6 GPS 模块
汽车惯性导航 (ADR) 是 u-blox 为一级汽车客户提供的业界公认的现成惯性导航解决方案。u-blox 的 ADR 解决方案使用紧密耦合的卡尔曼滤波器将 GPS 和传感器数字数据结合在一起。这可以在没有 GPS 信号或 GPS 信号减弱期间提高定位精度。NEO-6V 通过其软件传感器接口提供 ADR 功能。支持各种传感器(例如车轮转速计和陀螺仪),传感器数据通过来自应用处理器的 UBX 消息接收。这允许轻松集成和简单的硬件接口,从而降低成本。通过使用车辆总线上可用的数字传感器数据,硬件成本被最小化,因为惯性导航功能不需要额外的传感器。ADR 专为简单集成和轻松配置不同传感器选项(例如带或不带陀螺仪的)和车辆变体而设计,并且完全可自我校准。