XiaoMi-AI文件搜索系统
World File Search System室内

室内声学建模的新前沿 I
几何声学(GA)建模技术假设表面相对于感兴趣的波长较大。对于给定场景,从业者通常会创建一个具有大而平坦表面的 3D 模型,以满足很宽频率范围内的假设。这种几何近似会导致模拟声场的空间分布出现误差,因为会影响反射和散射行为的几何细节被忽略了。为了补偿近似值,建模者通常会估算表面的散射系数,以随机地解释反射方向性中实际的、与波长相关的变化。一种更具确定性的方法可以考虑一系列几何细节不断增加的模型,每个模型都在相应的频带上进行分析,以满足大表面尺寸的要求。因此,为了提高 GA 模拟的宽带空间精度,我们提出了一种多分辨率建模方法。使用波纹墙的比例模型测量、我们的方法与非 GA 技术的比较以及一些简单的听力测试,我们将展示
一种主动低成本网状网络室内跟踪系统
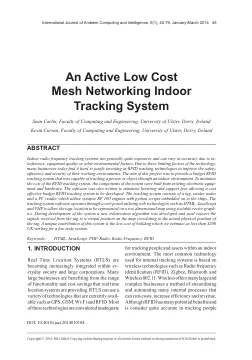
室内射频跟踪系统通常非常昂贵,并且由于干扰、设备质量或其他环境因素,其准确性可能会有所不同。由于这些技术限制因素,当今许多企业发现很难证明投资 RFID 跟踪技术来改善其工作环境的安全性、效率和保障是合理的。该项目的目的是提供一种经济实惠的 RFID 跟踪系统,该系统能够在室内环境中跟踪人或物体。为了最大限度地降低 RFID 跟踪系统的成本,系统的组件由现有的电子设备和硬件构建而成。该软件的编写也旨在最大限度地减少许可和支持费用,从而开发出具有成本效益的经济实惠的 RFID 跟踪系统。跟踪系统由标签、读取器节点和 PC 读取器组成,它们使用带有嵌入到芯片中的 Python 脚本的 Synapse RF 100 引擎。跟踪系统软件通过 Web 门户运行,利用 HTML、JavaScript 和 PHP 等 Web 技术,允许使用可缩放矢量图形在二维地图上表示标签位置。在系统开发过程中,我们开发了一种新的三边测量算法,并将从标签接收到的信号转换为与标签实际物理位置相关的地图上的虚拟位置。该系统的独特之处在于其建造成本低,我们估计不到 20 英镑
一种主动低成本网状网络室内跟踪系统
室内射频跟踪系统通常非常昂贵,并且由于干扰、设备质量或其他环境因素,其准确性可能会有所不同。由于这些技术限制因素,当今许多企业发现很难证明投资 RFID 跟踪技术来改善其工作环境的安全性、效率和保障是合理的。该项目的目的是提供一种经济实惠的 RFID 跟踪系统,该系统能够在室内环境中跟踪人或物体。为了最大限度地降低 RFID 跟踪系统的成本,系统的组件由现有的电子设备和硬件构建而成。该软件的编写也旨在最大限度地减少许可和支持费用,从而开发出具有成本效益的经济实惠的 RFID 跟踪系统。跟踪系统由标签、读取器节点和 PC 读取器组成,它们使用带有嵌入到芯片中的 Python 脚本的 Synapse RF 100 引擎。跟踪系统软件通过 Web 门户运行,利用 HTML、JavaScript 和 PHP 等 Web 技术,允许使用可缩放矢量图形在二维地图上表示标签位置。在系统开发过程中,我们开发了一种新的三边测量算法,并将从标签接收到的信号转换为与标签实际物理位置相关的地图上的虚拟位置。该系统的独特之处在于其建造成本低,我们估计不到 20 英镑

植物对室内空气质量、能源使用和……的影响
................................................................................................................................................................ 3
办公室内药品管理和药物分配
CDT® 是美国牙科协会的注册商标 服务描述 药物的肠外给药是指任何绕过胃肠道的给药途径。这些途径包括但不限于静脉给药、肌肉注射和皮下注射以及使用药物贴剂和鼻腔喷雾剂。牙科诊所可能会给患者提供许多药物以供其在家中使用,这些药物包括处方强度牙膏和漱口水,以及抗生素和止痛药。Exparel®(Pacira Pharmaceuticals, Inc)是一种缓释、长效局部注射剂,将布比卡因封装在多囊脂质体中。随着脂质膜被吸收,脂质体逐渐释放布比卡因,从而产生缓释和长时间镇痛。它旨在减少或消除在治疗术后疼痛时对阿片类药物的需求;然而,阿片类药物减少的临床意义尚未确定(Noviasky)。根据 CA AB2585:虽然非药物疼痛管理策略在牙科领域并不常见,但如果合适,应鼓励使用。临床证据 Gorecki 等人(2018 年)进行了一项前瞻性、随机、双盲、安慰剂对照、平行组 II 期单中心研究(ClinicalTrials.gov NCT01706588),以评估在下颌第三磨牙手术前局部黏膜下注射双氯芬酸 HPβCD 的疗效、安全性和局部耐受性。 75 名需要进行下颌第三磨牙手术的患者被随机分成 5 组:5 mg/1 mL 双氯芬酸 HPβCD、12.5 mg/1 mL 双氯芬酸 HPβCD、25 mg/1 mL 双氯芬酸 HPβCD、50 mg/1 mL 双氯芬酸 HPβCD 或 1 mL 安慰剂。在局部麻醉完成后,将研究药物在手术前注射到手术部位周围的粘膜组织中。主要结果测量是从手术结束到术后 6 小时的累积疼痛评分的曲线下面积 (AUC)。这证明了活性组和安慰剂之间的整体治疗效果,从而证实了研究药物的疗效 (p = 0.0126)。次要结果测量包括疼痛发作时间和患者需要救援药物的时间,两者均显示研究药物与安慰剂相比具有统计学意义。抢救药物治疗时间介于 7.8 小时(25 mg/1 mL 双氯芬酸 HPβCD)和 16 小时(50 mg/1 mL 双氯芬酸 HPβCD)之间。5 mg/1 mL 溶液似乎优于 12.5 mg/1 mL 和 25 mg/1 mL 溶液(抢救药物治疗时间 = 12.44 小时)。共有 14% 的患者出现轻微药物不良反应 (ADR),其中 2 例出现皮瓣坏死。这些反应无需进一步干预即可解决。作者总结说,这些结果总体上表明疗效、安全性、以及在第三磨牙手术前局部使用双氯芬酸 HPβCD 作为黏膜下注射的相对耐受性。Al-Dajani(2017)对 32 名患者进行了一项三盲分口随机对照临床试验,这些患者在连续 2 个疗程中随机拔除双侧阻生下颌第三磨牙。每位患者在第 1 个疗程术前接受单剂量地塞米松 (0.1 mg/kg) 肌肉注射,在另一疗程接受安慰剂注射。术后 7 天内每天收集数据,并解释 14 个以患者为中心的结果。结果显示,使用地塞米松后,患者报告疼痛减轻,服用的止痛药减少,肿胀减轻,进食和享受食物的困难减少,说话困难减少,咬合困难减少。此外,他们缺课或缺勤的次数减少,日常活动受到的干扰也减少。两种情况在出血、不适和睡眠障碍方面的差异并不显著。作者总结说,除非有禁忌症,否则在第三磨牙手术前肌肉注射预防性地塞米松是一种安全有效的减少疼痛和不适、增强口腔功能和日常活动的策略。Arora 等人(2014 年)进行了一项前瞻性随机双盲安慰剂对照临床试验,以评估下颌第三磨牙拔除术后联合使用阿莫西林和克拉维酸是否能有效预防炎症并发症。48 名患者每人两颗双侧相似的阻生下颌第三磨牙被随机分配到两个治疗组(第 I 组和第 II 组)。每个患者作为自己的对照。每位患者在手术前 1 小时接受 625 毫克阿莫西林和克拉维酸联合治疗。在第三磨牙的情况下作者总结道,除非有禁忌症,否则在第三磨牙手术前肌肉注射预防性地塞米松是一种安全有效的减少疼痛和不适、改善口腔功能和日常活动的策略。Arora 等人(2014 年)进行了一项前瞻性随机双盲安慰剂对照临床试验,以评估下颌第三磨牙拔除术后联合使用阿莫西林和克拉维酸是否能有效预防炎症并发症。48 名患者每人两颗双侧相似的阻生下颌第三磨牙被随机分配到两个治疗组(第 I 组和第 II 组)。每个患者作为自己的对照。每位患者在手术前 1 小时接受 625 毫克阿莫西林和克拉维酸联合治疗。对于第三磨牙作者总结道,除非有禁忌症,否则在第三磨牙手术前肌肉注射预防性地塞米松是一种安全有效的减少疼痛和不适、改善口腔功能和日常活动的策略。Arora 等人(2014 年)进行了一项前瞻性随机双盲安慰剂对照临床试验,以评估下颌第三磨牙拔除术后联合使用阿莫西林和克拉维酸是否能有效预防炎症并发症。48 名患者每人两颗双侧相似的阻生下颌第三磨牙被随机分配到两个治疗组(第 I 组和第 II 组)。每个患者作为自己的对照。每位患者在手术前 1 小时接受 625 毫克阿莫西林和克拉维酸联合治疗。对于第三磨牙

可持续室内设计的废物最小化策略
摘要 最近,室内设计经历了巨大的变化,其策略强调为人们的生活、工作和娱乐设计环境可持续和健康的空间。环境责任意识引发了环境可持续室内设计实践的必要性。整个社会开始认识到空间、人和社区之间的联系。在肯尼亚,没有明确的废物最小化策略可供室内设计师在实践中采用,以实践可持续的室内设计。这项研究旨在确定室内设计师使用的最合适的废物最小化策略,并提出一种室内设计师可以采用的废物最小化策略,以实现可持续的室内设计。文献是通过桌面研究收集的,其中包括对已发表的在线学术期刊和书籍进行文档分析。研究表明,室内设计师在减少产生的废物方面发挥着重要作用,因为他们是被指派推荐使用的材料和工艺的一方。此外,还有许多废物最小化策略可用于实现可持续的室内设计。研究得出结论,室内设计师应该采用评估工具,因为与其他废物最小化策略相比,它们具有很多优势。评估工具评估、支持和促进建筑行业的可持续发展,并通过数据检查、评估和差异化过程提供一种方案,让人们对可持续性有广泛的了解。

Angela Budroni 室内自动模型重建...
2用于模型重建的三维传感5 2.1 3D传感器概述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。5 2.1.1被动传感器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。6 2.1.2主动传感器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 2.2基于脉冲运行时确定的陆地激光扫描系统。。。。。。。。。。。13 2.2.1扫描机制。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。14 2.2.2脉冲检测方法。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。15 2.2.3案例研究中使用的激光扫描仪。。。。。。。。。。。。。。。。。。。。。。。。。16 2.3真实场景模型重建。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 2.3.1从范围数据重建。。。。。。。。。。。。。。。。。。。。。。。。。。。。18

设计和实施机器人消防员室内应用程序
摘要 - 背景:保持人和事物安全涉及新颖的消防技术的不断发展。机器人已经成为消防中的可行资产,能够执行危险的职责并减少对人类生活的危害,尤其是在封闭的空间中。目的:本研究的目的是调查部署能够自主检测和灭火建筑物的机器人的可行性,从而改善各种室内环境的安全性,例如工厂,医院,学校和政府建筑。方法:该机器人用敏捷性的全向轮模块化构建,它们结合了多个传感器,例如热成像摄像机,气体传感器和障碍物检测传感器。实施需要在模拟的内部环境中进行严格的测试,以检查机器人检测和扑灭火焰的能力,围绕障碍物操纵,并在限制期内有效地发挥作用。机器人的体系结构还允许将来升级和组件更换。结果:试验表明,在模拟情况下,机器人可以识别和扑灭火焰和遍历障碍物。机器人的模块化设计强调了其在各种内部情况下的多功能性和应用,这表明了其减少火灾损害和改善安全性的潜力。结论:本文证明了在危险的室内情况下使用机器人进行消防的可行性和承诺。结果强调了开发的机器人的灵活性和适应性,为机器人技术和消防方法的未来进步铺平了道路,这对提高安全性并降低了各种室内应用中的危害。

铁路室内创新峰会欧洲2024
多年来,该公司已成长为多层床单和电影的合作专家,并已被称为该领域的技术领导者。来自Piesendorf Senoplast的奥地利总部,为世界各地的客户和各种行业提供Senosan®产品。商标senosan®建立的塑料纸和电影不仅在汽车和运输行业中使用,而且在卫生和家具行业中以优异的质量和出色的表面而闻名。在2000年,在墨西哥Querétaro开设了一个额外的生产地点,这意味着北美自由贸易协定地区的客户可以更快地提供服务。全球第三个生产部门于2020年5月在中国苏州开始生产。senoplast通过创新的,高质量的塑料床单以及由ABS,ABS/PC,PC,PC,ASA,PMMA和PS制成的创新和高质量的塑料纸和电影,作为原材料,包括阻燃材料。