XiaoMi-AI文件搜索系统
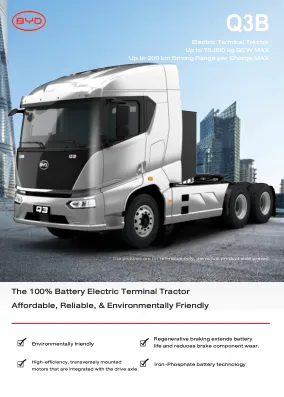
World File Search System拖拉机

机械拖拉机
手动培训老师/手工艺教练;根据定义的工作角色,指示学生/职业培训机构的各自交易。授予使用相关行业和相关主题工具和设备的理论说明。展示了与研讨会贸易有关的过程和运营;监督,评估和评估学生的实际工作。确保商店中设备和工具的可用性和正确运行。拖拉机机械师;通过各种机械工艺进行农业,建构和其他重型职责的维修和大修拖拉机。检查并驱动汽车在道路上或以固定位置运行的发动机来诊断麻烦和缺陷。根据缺陷的性质拆除部分或完整的发动机或单位。维修或替换有缺陷的零件,通过必要的进一步工具将其重新组装为规定的设置,清除,时间和调整,并确保拟合的准确性。在车辆底盘上牢固地安装组装或维修的发动机,并连接油和燃油管线,控件和其他配件。启动发动机,并观察到任何异常噪音和敲击的性能。调整化油器,燃油泵(用于汽油发动机的化油器和柴油发动机的燃油泵),在敲击和阀之间设置清除,调音发动机,调整制动器,进行刹车,进行电气连接并执行其他任务以确保性能。可以修理和大修电动机,燃油泵,化油器等发动机。可能会焊接烧烤或焊接零件。并被指定为机械师,农业机器。可以修复其他农业机械,用于耕作,平整,收获等。拖拉机操作员,农场;运营和服务农场拖拉机具有不同的耕作,痛苦,收获和其他农业业务的附件。检查拖拉机的不同部分,以确保其处于适当的工作状态。收集,附加和调整拖拉机不同操作所需的特殊设备。用燃料喂食拖拉机,并将其划为土地以耕作。启动拖拉机,并根据土壤和工作的性质以调节速度将其驱动。控制不同附件的操作,包括根据需要操作杆和踏板对车轮转动的操作。在需要时拖着拖车,上面放着农作物和其他材料。清洁和油机。将拖拉机和其他工具保持在良好的工作状态,并保留燃油消耗的记录。可能会监督帮助者的工作。可以检测机械缺陷并进行较小的维修。参考NCO 2015:

MK-V拖拉机
“!'!'''&!'%#%'“%(&''%'&',!&'%('!&!&!”!),'”)%(&%&&!%('(%'%'%!''''%)!'! “%(&”! *,&!#(%”(%','“”!'!'&“&#%'”%(!'&%“(&!(%,!(!'&#%'“%((&'#' *''''%'%!“'!”! &('!“%'!”!'!(')!''#%“('$(',!!! !!“)'”! &“!&, +&'!,”(%(!'!“)')'(%&&(&%”!''%(!“%'&!”%!'“” %%,#&&!%&&&!%&'%('#%'''%)&,''%'%!'%“%)”,!” '%*&(&“&”!'%” !!(%,)!''''*''#%''! %''%)%'*%%&!,'#%'%!“(&#'''% *',“(%”('%'&“!#%&&',”('“!”“(&(!'”!&!'“(%!)%'#'!('!”“(&(!'!,”()!'#%'% *&(&&(,%)!'%'% *'!'#%''%!'&'%&'
可持续性 - 联合拖拉机
2018年,公司业绩保持增长,离不开各子公司的大力支持和贡献。公司仍然专注于3D战略(差异化、多元化和数字化)来应对业务动态并捕捉更广泛的市场机会。鼓励各子公司开展业务创新,增强竞争优势,运用最佳运营标准,实现最有效、最高效的流程,强化动力煤业务以外业务板块的能力,夯实公司业务连续性的基础。各子公司必须有同样的热情,成为公司盈利的重要贡献者。在日益多元化和平衡的业务组合的支持下,公司迅速抓住机遇,赢得客户信任并提高市场份额。

使用多纤维拖拉机
开发了基于药物的治疗神经干细胞(NSC)迁移的模型,并用于预测幼稚小鼠脑中NSC的迁移。该模型利用了广义Q采样成像,该成像能够解析大脑中交叉的白质纤维,并显示出与扩散张量张量成像相比,可以更好地说明NSC迁移模式的变化。在将模型校准为实验数据时,我们表明该模型能够重现小鼠大脑中NSC的分布。此外,我们表明NSC在小鼠大脑中的分布对NSC注入的位置敏感。NSC在嗅球上的持续分布与包括和尾迁移的发育途径一致,这表明幼稚大脑中的治疗NSC的未来模型可能需要包括其他因素,例如趋化性或血液流量,例如在NSC迁移路径中考虑变化。结果突出了该模型在预测哪些注入位置可能为给定目标位置提供最佳分布的有用性。

使用多纤维拖拉机
开发了基于药物的治疗神经干细胞(NSC)迁移的模型,并用于预测幼稚小鼠脑中NSC的迁移。该模型利用了广义Q采样成像,该成像能够解析大脑中交叉的白质纤维,并显示出与扩散张量张量成像相比,可以更好地说明NSC迁移模式的变化。在将模型校准为实验数据时,我们表明该模型能够重现小鼠大脑中NSC的分布。此外,我们表明NSC在小鼠大脑中的分布对NSC注入的位置敏感。NSC在嗅球上的持续分布与包括和尾迁移的发育途径一致,这表明幼稚大脑中的治疗NSC的未来模型可能需要包括其他因素,例如趋化性或血液流量,例如在NSC迁移路径中考虑变化。结果突出了该模型在预测哪些注入位置可能为给定目标位置提供最佳分布的有用性。

舰载飞机-拖拉机的轨迹规划与跟踪...
如何自主规划出协同运动轨迹并及时准确地控制舰载机的运动是提升整体甲板作业效率的关键。本文主要讨论的问题是多舰载机协调轨迹规划策略及牵引机与舰载机的协同控制。首先,建立无拖杆牵引系统运动学模型和三自由度动力学模型;其次,提出一种飞机系统协同进化机制以确保多飞机协调轨迹规划并基于混合RRT∗算法生成适应于牵引机系统的轨迹;其次,在不完全约束和各种物理条件约束下,设计双层闭环控制器实现甲板上牵引机系统的轨迹跟踪。外层模型预测控制器有效控制载机与牵引车的协同运动,内层基于自适应模糊PID控制的力矩控制策略严格保证系统的稳定性。仿真结果表明,与反步控制和LQR算法相比,该控制器具有更快、更精确的控制速度,对有初始偏差的直线轨迹、大曲率正弦曲线、甲板上的复杂轨迹具有更强的鲁棒性。
空气拖拉机 AT-802/802A
作为 AT-802/802A 飞行员,您有责任完成类型等级豁免的培训要求,获得完成培训要求的证明文件,并将这些记录作为飞行员记录的一部分进行维护,以备将来被要求出示。您还需要维护、拥有并能够出示此类型等级豁免当前修订级别的副本,并始终按照其中的要求进行操作。始终可以在 www.airtractor.com 上找到类型等级豁免的最新版本。强烈建议您在每次维护/检查时以及每年赛季开始前确认飞机上携带了类型等级豁免的最新版本。经验丰富的“传统”AT-802/802A 飞行员可能能够利用 Air Tractor 飞机的先前经验来免除类型等级豁免的飞行员培训要求,但应仔细阅读豁免中的相关规定。选择利用先前经验免除培训要求的飞行员应确保在其飞行员日志中保留适当的文件。