XiaoMi-AI文件搜索系统
World File Search System挑选
高性能活动架构 - Airclad X
本书仅介绍了我们过去项目的一小部分,旨在解释我们提供的购买和租赁的核心产品。很明显,AirClad 具有巨大的品牌化和个性化潜力,可实现多种外观。此外,我们还挑选了一些案例研究,展示了我们与品牌和客户的密切关系如何帮助突破可能的界限。

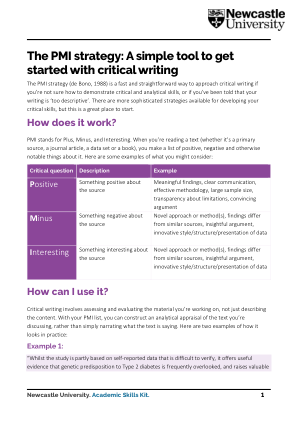
PMI 策略:开始批判性写作的简单工具
• P(加分项)- 关于文艺复兴的概念是否真的有助于我们对过去的理解,这是一个有益的讨论 • M(减分项)- “挑选”证据,忽略所有与他的主要论点不符的文本/来源 • I(有趣)- 不寻常地使用情绪化语言;让我们思考“文艺复兴”的概念是否真的意味着什么

人工智能技术对零工经济工作者生产力的影响
每月批次数量 -1.850% 0.522 每批次平均商品数量 -0.658% 0.343 每批次平均花费(美元) 0.058% 0.933 商品平均比例:找到 -0.099% 0.573 商品平均比例:更换 0.472% 0.616 商品平均比例:退款 1.499% 0.285 平均挑选时间(秒) 0.137% 0.866

机器人臂的视觉伺服算法,用于拾取和放置应用
机器人臂是由连接接头连接的链路的移动链组成的设备。电动机经常用于移动每个机器人臂接头。可以在空间中自由移动的最终效应器通常连接到固定的机器人平台的一端。机器人武器可以以速度和精度进行重复操作,远远超过了人类操作员。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。 机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。 此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。 但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。 有两种分析机器人臂运动的方法:前进和逆运动分析。 基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。 首先,实现了一种对象识别算法来识别要掌握的对象。 然后,避免发生任何障碍的算法。 研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。 因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。有两种分析机器人臂运动的方法:前进和逆运动分析。基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。首先,实现了一种对象识别算法来识别要掌握的对象。然后,避免发生任何障碍的算法。研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。

尽管有严格的污染控制,龙宫小行星样本仍迅速被陆地生命殖民
样本被密封在密封舱内运回地球,在 10,000 级洁净室中用氮气打开,以防止污染。用消毒工具挑选单个颗粒,并将其存放在密封容器中,在氮气下保存。在分析之前,样本经过纳米 X 射线计算机断层扫描,并嵌入环氧树脂块中,以进行扫描电子显微镜检查。
NASA 演讲 Ronald L. Thomas ...
第一财年,我们计划在同一领域进行几项平行研究。每项研究可能都有几个不同的概念。接下来的重点是挑选出有可能在 5 年内实际完成的系统。这些系统将由顾问委员会审查。顾问委员会将由从事该领域的行业和大学代表以及公用事业或其他潜在用户的代表组成。


执行传记-Carmelo lo faro
他一直被挑选,以领导重大周转,开发和交付并购协同作用,通过创新,技术和数字化转型来提高运营绩效并推动增长。他还是高级材料,航空航天和防御部门的几个成功全球合作伙伴关系的建筑师。目的,价值观和结果驱动,Carmelo对科学,技术和人类维度充满热情,并且一直在建立和领导多样化,全球和创新的团队。
预测性设备维护解决方案 - SPECTRO CS
组成 ITL 的仪器经过精心挑选,因为它们不仅提供有效监测油润滑设备状况所需的数据,还因为它们易于操作和维护,安装时只需极少的特殊工具,并提供强大的样品吞吐量(大多数测量大约需要 1 分钟)。分析仪器将结果发送到中央计算机(或网络),并存储在数据库文件中,以供后续分析、评估和报告。