XiaoMi-AI文件搜索系统
World File Search System探路

jurnal mantik探路的比较分析...
探路算法在自动导航的领域至关重要,从而影响了机器人和AI系统的效率和安全性。本文在具有静态障碍物的基于网格的模拟中,对三种突出的探路算法进行了比较分析:A*算法,粒子群优化(PSO)和FICK的定律算法(FLA)。我们根据路径最佳,计算效率和对标准化环境的适应性评估每种算法的性能。A*算法以其基于启发式的搜索而闻名,它通过利用特定于网格的启发式方法来显示出卓越的性能。PSO受自然界的社会行为的启发,展示了路径轨迹的灵活性,在障碍物周围提供了更平滑的导航。fla是一种较新的方法,在A*的确定性和PSO的随机行为之间取得了平衡,显示了计算资源有限的应用中的潜力。我们的发现表明,尽管A*仍然是需要精确探路的网格限制导航的最佳选择,但PSO和FLA在优先级的灵活性和计算简单性的情况下可能会提供优势。这项研究增强了对探路方法的理解,为未来的研究铺平了道路,以改善这些算法的动态环境,并整合自适应启发式机制,以改善现实世界的适用性。

基于探路器的超深地下公共空间安全疏散模型
近年来,许多城市加大了地下公共空间的开发利用,但安全疏散问题制约了地下空间的开发,设计一套适合超深地下公共空间的安全疏散模型迫在眉睫。本文从建筑设计的角度,构建了一种将下沉式避难所与自行设计的安全疏散系统(SES)相结合的安全疏散模型,并与其他模型的效果进行了比较。随后,在Pathfinder上对重庆轨道交通10号线红土地站的安全疏散模型进行了仿真。结果表明,将下沉式避难所与SES相结合的安全疏散模型对于超深地下公共空间人员疏散是可行的,该研究为超深地下公共空间的安全疏散技术提供了新的思路。
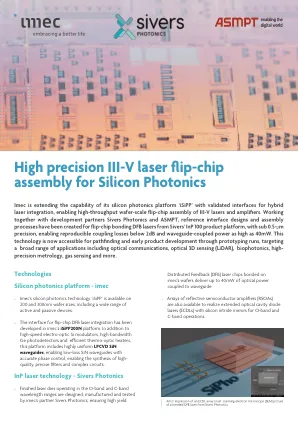
硅光子学的高精度III-V激光芯片组件
IMEC正在扩展其硅光子平台“ ISIPP”的功能,并具有经过验证的混合激光积分界面,从而使IIII-V激光器和放大器的高通量晶片尺寸翻转芯片组装能够。与开发合作伙伴Sivers Photonics和ASMPT合作,参考接口设计和组装过程是为来自Sivers INP 100产品平台的Flip-Chip键合DFB激光器而创建的,其精度为0.5μm,使得可重复的耦合损失在2DB和Waveguide-couped-couped and As高度符合40mmw。该技术现在可以通过原型运行来进行探路和早期产品开发,针对广泛的应用,包括光学通信,光学3D传感(LIDAR),生物光音,高精度计量学,气体传感等。

使用Finternet跨境FX交易
摘要跨境外汇(FX)交易长期以来一直受到低效率,包括高成本,冗长的处理时间和有限的透明度,因为它们依赖传统的银行业务基础和多个中间人。本文通过整合Finternet生态系统和统一的分类帐技术,介绍了FX转移的新颖性。我们的解决方案介绍了一个分散的体系结构,该体系结构能够具有即时的沉降功能,可以连续运行,同时保持监管符合条件。我们演示了该系统如何通过统一的分类帐实施来减少中介机构,提供实时流动性信息,并利用智能合约来自动探路。纸张介绍了包括分散的标识符(DIDS),可验证的凭证和货币令牌过程,这些技术组成部分,可实现有效的,有效的跨境交易。我们的发现表明,这种方法通过将定居时间从几天到几秒钟,降低交易成本以及通过不可变的交易记录提高透明度来显着改善传统网络转移。这项工作通过提出可扩展的可互操作解决方案,使创新与监管要求之间的可扩展,可互操作的解决方案提出了不断发展的景观。

算法图:探索路径通过...
II。 相关的工作Matthias Ankerst,Daniel Keim和Hans-Peter Kriegel(2009)[1]提出,探路者:一种可视化路径分析的方法。 IEEE视觉语言和以人为中心计算(VL/HCC)的IEEE研讨会的会议,引入探路者,这是一种可视化大而复杂的图形中探路算法的方法。 这使用户可以深入了解算法本身的决策过程。 Yves Kodratoff和Robert Armstrong(1994)[2]提出了广度优先的搜索和深度优先搜索:将约束转换为偏好作者。 第十二届国际人工智能会议(IJCAI)会议录,探索对广度优先搜索(BFS)和深度优先搜索(DFS)算法的修改,以在图形遍历过程中纳入用户偏好。 C. Y. Lee(1961)[3]提出了一种用于路径连接及其应用的算法IR IR IR IR IRE TRACTACTIONS在电路理论上。 介绍深度优先搜索(DFS)算法的开创性纸。 本文探讨了如何将DFS用于电路设计中的电线路由,从而为电路板上的电线找到有效的路径。 除了路由之外,DFS还具有查找连接组件或分析拓扑结构的应用。II。相关的工作Matthias Ankerst,Daniel Keim和Hans-Peter Kriegel(2009)[1]提出,探路者:一种可视化路径分析的方法。IEEE视觉语言和以人为中心计算(VL/HCC)的IEEE研讨会的会议,引入探路者,这是一种可视化大而复杂的图形中探路算法的方法。这使用户可以深入了解算法本身的决策过程。Yves Kodratoff和Robert Armstrong(1994)[2]提出了广度优先的搜索和深度优先搜索:将约束转换为偏好作者。第十二届国际人工智能会议(IJCAI)会议录,探索对广度优先搜索(BFS)和深度优先搜索(DFS)算法的修改,以在图形遍历过程中纳入用户偏好。C. Y. Lee(1961)[3]提出了一种用于路径连接及其应用的算法IR IR IR IR IRE TRACTACTIONS在电路理论上。介绍深度优先搜索(DFS)算法的开创性纸。本文探讨了如何将DFS用于电路设计中的电线路由,从而为电路板上的电线找到有效的路径。除了路由之外,DFS还具有查找连接组件或分析拓扑结构的应用。

PDF 476.42 K div>
a b s t r a c t在电气分配系统(EDS)中分配可再生能源系统(RESS)(EDS)对于实现各种目标至关重要。但是,他们的间歇性提出了一些挑战。在这方面,采用有效的元式途径探路算法(PFA)来确定光伏(PV)和风力涡轮机(WT)系统的最佳位置和大小以及储能系统(ESS)和电容器库(CB)(CB)(CB)(CB),用于机器的操作模式。为减少损失,温室气体(GHG)排放和电压剖面提高而制定了目标函数。在两种情况下显示了IEEE 33-总线EDS系统的模拟结果:与网格连接和岛化。将PFA的计算有效性与文献中报道的相比。PFA结果显示出出色的解决困难优化问题的能力。此外,当网络以网格连接模式运行时,RES的最佳大小可以显着提高性能。使用PV系统和另一个分别将WT系统降低至69.68%和67.85%,实际功率损失和温室气体排放分别减少了48.49%和67.75%。但是,ESS,CB和PV/WT的结合可以使EDN可持续为岛屿的运营方式。

从神经引导因素Netrin-1中的见解到神经变性和其他疾病
Netrin-1是用于轴突引导的规范化趋化提示。可以追溯到1890年代,当Cajal博士提出轴突可能会受到可扩散的线索的指导,这些提示吸引了脊柱连任神经元轴突向胚胎脊髓的腹中线的投影,这些提示是分泌的,并在其中分泌了这些线索,并形成了化学动物的渐变渐变(Moore in neuroerepithium(Moore)(Moore)(Moore)。Netrin-1与Netrin-2一起在胚胎鸡脑匀浆中发现并纯化。随后,其他Netrin家族蛋白已被鉴定或与果蝇,小鼠和人类有关(Moore等,2007)。现在,发现Netrins不仅在轴突探路中起作用,而且在其他多种细胞过程中起关键作用,包括细胞迁移,粘附,分化和生存,并参与神经变性(Jasmin等,2021),炎症,炎症,炎症,癌症(Xia等,2022),癌症和其他临床疾病(2022)。Netrin-1已在帕金森氏病(PD),阿尔茨海默氏病(AD)和其他类型的神经系统疾病中进行了研究,我们发现了与AD发病机理有关的Netrin-1的新证据(Bai等,2020)。在这里,我们提供了Netrin-1的概述,以突出其在这些神经系统疾病中的机械作用和生物标志物潜力。

E. Glenn Lightsey David David Lewis太空系统技术教育教授
2016-2019航天系统设计实验室主任,2016年至2016年至2016年至2019年,2016年8月至今的教职员工顾问,朗布林火箭俱乐部,2018年8月至2018年8月至今的教师顾问,2018年8月的教师顾问,2018年8月9日,空间勘探和开发(Space Neveries),2017年8月(SATES),2017年8月的学生,2017年8月(SATES),2017年8月,2018年8月至中心(SATES),2018年8月,PRAMBLIN ROCKET俱乐部,2016年8月,2016年8月至今选定的专利和发明披露没有选定的出版物:2015年至今1。 Eldad,O。,Lightsey,E。G.,“非平面太阳帆的无螺旋桨态度控制”,AIAA指导,控制和动力学杂志,第1卷。 38,编号 8,2015年8月,第1页。 1531-1534。 2。 Johl,S.,Lightsey,E。G.,“大学Cubesat Missions的可重复使用的命令和数据处理系统”,《小卫星》,第1卷。 4,编号 2,2015年10月,pp。 357-369。 3。 Stevenson,T.,Imken,T.,Lightsey,E。G.,“为行星际立方体任务的冷气油推进器的设计和测试,”《小卫星杂志》,第1卷。 4,编号 2,2015年10月,pp。 5371-386。 4。 McBryde,C。R.,Lightsey,E。G.,“对小卫星的双重使用成像传感器的端到端测试”,《小卫星》,第1卷。 5,编号 1,2016年2月,第1页。 435-448。 5。 Kjellberg,H。C.,Lightsey,E。G.,“离散的四季节约束态度探路”,AIAA指导,控制和动力学杂志,第1卷。 39,编号 3,2016年3月,pp。 713-718。 6。 53,编号 7。2016-2019航天系统设计实验室主任,2016年至2016年至2016年至2019年,2016年8月至今的教职员工顾问,朗布林火箭俱乐部,2018年8月至2018年8月至今的教师顾问,2018年8月的教师顾问,2018年8月9日,空间勘探和开发(Space Neveries),2017年8月(SATES),2017年8月的学生,2017年8月(SATES),2017年8月,2018年8月至中心(SATES),2018年8月,PRAMBLIN ROCKET俱乐部,2016年8月,2016年8月至今选定的专利和发明披露没有选定的出版物:2015年至今1。Eldad,O。,Lightsey,E。G.,“非平面太阳帆的无螺旋桨态度控制”,AIAA指导,控制和动力学杂志,第1卷。38,编号8,2015年8月,第1页。1531-1534。2。Johl,S.,Lightsey,E。G.,“大学Cubesat Missions的可重复使用的命令和数据处理系统”,《小卫星》,第1卷。 4,编号 2,2015年10月,pp。 357-369。 3。 Stevenson,T.,Imken,T.,Lightsey,E。G.,“为行星际立方体任务的冷气油推进器的设计和测试,”《小卫星杂志》,第1卷。 4,编号 2,2015年10月,pp。 5371-386。 4。 McBryde,C。R.,Lightsey,E。G.,“对小卫星的双重使用成像传感器的端到端测试”,《小卫星》,第1卷。 5,编号 1,2016年2月,第1页。 435-448。 5。 Kjellberg,H。C.,Lightsey,E。G.,“离散的四季节约束态度探路”,AIAA指导,控制和动力学杂志,第1卷。 39,编号 3,2016年3月,pp。 713-718。 6。 53,编号 7。Johl,S.,Lightsey,E。G.,“大学Cubesat Missions的可重复使用的命令和数据处理系统”,《小卫星》,第1卷。4,编号2,2015年10月,pp。357-369。3。Stevenson,T.,Imken,T.,Lightsey,E。G.,“为行星际立方体任务的冷气油推进器的设计和测试,”《小卫星杂志》,第1卷。4,编号2,2015年10月,pp。5371-386。4。McBryde,C。R.,Lightsey,E。G.,“对小卫星的双重使用成像传感器的端到端测试”,《小卫星》,第1卷。5,编号1,2016年2月,第1页。435-448。5。Kjellberg,H。C.,Lightsey,E。G.,“离散的四季节约束态度探路”,AIAA指导,控制和动力学杂志,第1卷。39,编号3,2016年3月,pp。713-718。6。53,编号7。Gamble,K.,Lightsey,E。G.,“小型卫星风险管理的决策顾问工具”,AIAA《航天器和火箭杂志》,第1卷。3,2016年5月,pp。420-432。Tam,M.,Lightsey,E。G.,“使用混合整数凸面编程的约束航天器的重新定位”,Acta Astronautica,第1卷。127,2016年10月,pp。31-40。8。Eldad,O.,Lightsey,E。G.,Claudel,C。C.,“具有模型不确定性的可变形太阳能帆的最低时间态度控制”,AIAA航天器和火箭杂志,第1卷。54,编号4,2017年7月,pp。863-870。9。Lightsey,E。G.,Stevenson,T.,Sorgenfrei,M。,“为星际内立方体的3-D打印冷气油推进器的开发和测试,” IEEE的会议记录,第1卷。106,编号3,2018年3月,pp。379-390。10。Stevenson,T.,Lightsey,E。G.,“检查员Cubesat的多功能3D打印结构的设计和优化”,Acta Astronautica,第1卷。170,pp。331-341。出版物,2015年至今:27职业出版物:141

预先一项研究澳大利亚发展的研究...
澳大利亚和全球合作伙伴使用的地球观察卫星。o开发澳大利亚太空领域的途径,包括制造业。•这项工作代表了在UNSW堪培拉太空的澳大利亚国家并发设计设施进行的第12项研究的第二项版本,并在Geoscience澳大利亚,澳大利亚航天局和CSIRO的支持下进行。•从2020年12月到2021年8月,共有21个组织的74个人进行了咨询或参与研究。•NASA/USGS(国家航空和太空管理局/美国地质调查局)Landsat计划为澳大利亚提供了关键的数据集。澳大利亚用户还与外国政府计划和商业运营商的数据一起越来越多地使用这些数据。本研究探讨了提高澳大利亚能力并为美国土地成像计划做出贡献的机会,同时改善了光学卫星的校准。•研究发现SCR在技术上和编程上是可行的。虽然整个系统中都不存在架子(COTS)选项的商业选择,但可以主要来自澳大利亚太空领域内的定制元素和所选元素的组合。•存在与NASA的Clarreo Pathfinder Mission的时间表保持一致,以最大程度地提高SCR探路者任务的结果,该任务于2023年底发射。但是,如果不可能,任务仍然会产生预期的效果。要与Clarreo保持一致,需要在2021年内启动SCR探路。•该研究确定了任务所需的四个特定卫星系统,这些系统今天不是COTS产品。这些系统的开发是澳大利亚发展支持SCR任务并保持出口潜力的能力的机会。•该研究确定了将在两个不同阶段发生的发展方法: