机构名称:
¥ 1.0
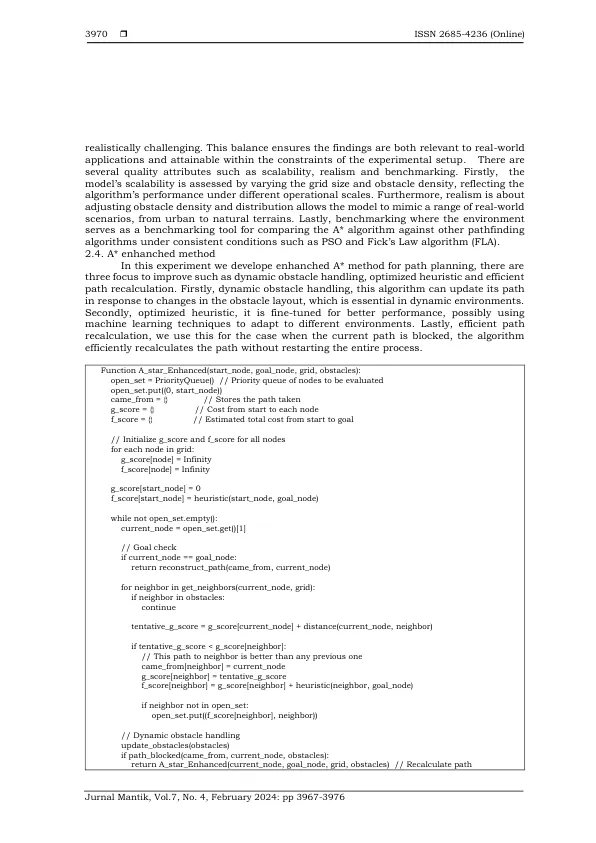
探路算法在自动导航的领域至关重要,从而影响了机器人和AI系统的效率和安全性。本文在具有静态障碍物的基于网格的模拟中,对三种突出的探路算法进行了比较分析:A*算法,粒子群优化(PSO)和FICK的定律算法(FLA)。我们根据路径最佳,计算效率和对标准化环境的适应性评估每种算法的性能。A*算法以其基于启发式的搜索而闻名,它通过利用特定于网格的启发式方法来显示出卓越的性能。PSO受自然界的社会行为的启发,展示了路径轨迹的灵活性,在障碍物周围提供了更平滑的导航。fla是一种较新的方法,在A*的确定性和PSO的随机行为之间取得了平衡,显示了计算资源有限的应用中的潜力。我们的发现表明,尽管A*仍然是需要精确探路的网格限制导航的最佳选择,但PSO和FLA在优先级的灵活性和计算简单性的情况下可能会提供优势。这项研究增强了对探路方法的理解,为未来的研究铺平了道路,以改善这些算法的动态环境,并整合自适应启发式机制,以改善现实世界的适用性。
jurnal mantik探路的比较分析...
主要关键词



相关文件推荐