XiaoMi-AI文件搜索系统
World File Search System气动

用于初步飞机设计的稳定跨音速气动和气动弹性建模
评审团:Prof.列日大学 Grigorios Dimitriadis 教授(顾问);列日大学 Vincent E. Terrrapon 教授(联合顾问);列日大学 Koen Hillewaert 博士(校长);列日大学 Romain Boman 教授。 Laurent Joly 博士,ISAIAH-SUPERIOR卡洛斯·布雷维格里尼(Carlos Breviglieri),巴西航空工业公司A.S. 博士马可·卡里尼(Marco Carini),ONERA

SP400 电动气动智能定位器 - 斯派莎克
3.1 描述 SP400 智能阀门定位器由 4 - 20 mA 输入信号回路供电,为气动线性和四分之一转阀门提供精确的自适应位置控制。通过阀门位置反馈保持精确控制,阀门位置反馈自动改变气动输出压力以克服阀杆摩擦和流动力的影响,从而保持所需的阀门位置。通过连续数字显示行程百分比来指示阀门位置。阀门位置反馈通过基于霍尔效应的非接触式技术检索。气动装置基于压电阀技术 - 因此,在稳定状态下可保证高分辨率、高可靠性、抗振动性和极低的空气消耗。SP400 包含许多智能功能,可以通过菜单驱动软件使用集成键盘和 LCD 字母数字数据进行完全编程。阀杆和定位器之间没有机械连接,大大简化了安装程序并减少了所需时间。此外,软件的设计尽可能简化了操作:调试只需将 SP400 组装到阀门上并按下一个按钮即可。SP400 配有 NAMUR 标准安装套件,用于连接到轭架或柱式安装执行器。对于四分之一转阀门,提供符合 VDI / VDE 3845 的安装套件。

探索气动驱动的可食用机器人的饮食体验:感知,口味和质地
这项研究调查了动画食品消费对人类心理学的影响。我们开发了一个可移动的,可食用的机器人,并通过可视化机器人的动作和进食来评估了参与者的印象。尽管已经开发了几种类型的Edible机器人,但据我们所知,与饮食相关的心理影响尚未得到研究。我们使用明胶和糖开发了一种肺炎驱动的可食用机器人。我们检查了它的外观和参与者的印象。在饮食实验中,我们评估了两个条件:一个机器人移动的条件,一个是一个驻扎。我们的结果表明,参与者对移动机器人的看法与施工机器人不同,在食用时会导致不同的看法。此外,当机器人被咬伤并在两个条件下咀嚼时,我们观察到了感知的纹理差异。这些发现为在各种情况(例如医疗领域和烹饪娱乐)中的可食用机器人的实际应用提供了宝贵的见解。
通过验证实验对叶片元素动量模型进行非线性气动校正
实验程序和注意事项 ........................17 空速测量 ................................18 推力测量 .................................19 功率测量 ..。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 数据采集。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 测试程序。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 数据缩减。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。21 不确定性。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。22
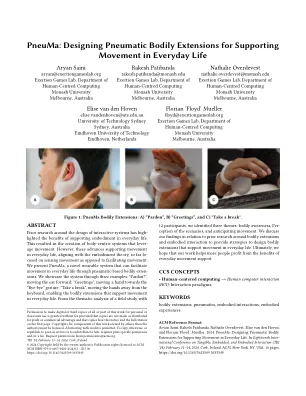
肺气:设计气动身体扩展以支持日常生活中的运动
围绕交互式系统设计的事先研究很大程度上点燃了在日常生活中支持实施例的好处。这导致创建了以身体为中心的系统来杠杆运动。然而,这些进步支持日常生活中的运动,与实施理论保持一致,到目前为止,与促进运动相反,它涉及感应运动。我们提出了一种新型的可穿戴系统,可以通过基于气动的身体延伸来促进日常生活的运动。我们通过三个示例展示了系统:“赦免?”,向前移动耳朵;“问候”,将一只手向“再见”手势;“休息一下”,将手从键盘上移开,从而实现了支持日常生活中运动的身体扩展。

应用贝叶斯推理估计 CALLISTO 气动数据库中的不确定性
生成气动数据库 (AEDB) 是 RLV 乃至整个航空航天飞行器开发中的一个重要方面,该数据库可描述飞行器的气动飞行品质。这些数据库通常通过简单的启发式模型从计算流体力学 (CFD) 模拟和风洞试验 (WTT) 中汇总而成。虽然这种经典方法适用于估算标称气动系数,但量化这些飞行前数据相对于最终飞行行为的不确定性仍然是一项艰巨的任务,需要大量的人类专业知识和“直觉”。然而,特别是对于运载火箭而言,这些不确定性对于确保稳健的制导和控制算法以及满足所选任务概况的飞行器性能至关重要。
转子固定和便携式装配工具目录
反作用杆螺母扳手简介。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.8 气动非仪表手枪式螺母扳手。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.10 带 Selectork 的气动非仪表手枪式螺母扳手。。。。。。。。。。。。。。。。。。。。。。。。。。。。.11 气动仪表手枪式螺母扳手。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。....12 无刷直流直列式螺母扳手 ...................。。。。。。。。。。。。。。。。。。。。。。。。.......13 气动非仪表直列式拧紧扳手 ............................................. 14 选装设备 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.16
Westgen Technologies:解锁 EPOD 经济型零排气气动仪表空气改造解决方案
• ERA 项目 ID:F0160791 • 项目名称:解锁 EPOD 经济型零排放气动仪表空气改造解决方案 • 收件人联系人姓名和信息:Connor O'Shea • ERA 项目顾问姓名:Aaron Baugh • 项目开始日期:2020 年 7 月 1 日 • 项目完成日期:2023 年 9 月 30 日 • 项目启动时的技术就绪水平 (TRL):6 级 • 项目完成时的 TRL:9 级 • FOR 提交日期:2024 年 2 月 14 日 • ERA 网站的简短项目描述和高水平结果(最多 1000 字):见下文。项目描述:Convrg Innovations(前身为 Westgen Technologies)启动了一项开创性的项目,旨在彻底改变石油和天然气行业的减排。该项目专注于 EPOD 技术的开发和部署,取得了非凡的里程碑,为环境、经济和社会层面做出了贡献。环境影响和温室气体减排:该项目使部署的 12 个机组的二氧化碳排放量显著减少 9,027 吨,为阿尔伯塔省的减排目标做出了显著贡献。展望未来,预测表明到 2032 年排放量将大幅减少。该项目致力于持续创新和可持续实践,使 Convrg Innovations 成为实现长期环境目标的关键参与者。虽然直接影响显而易见,但更广泛的影响延伸到预计的减排数字,与该省雄心勃勃的减排目标保持一致。Convrg 致力于推进减排技术,反映了对环境管理和能源行业可持续未来的承诺。这一减排量加上预期的未来影响,巩固了 Convrg Innovations 在石油和天然气行业引领环保解决方案方面的作用。该项目不仅满足了当前的环境目标,而且还积极为未来几年塑造更绿色、更可持续的能源格局做出贡献。

SCARA 机器人的电影设计和力分析...
摘要——气动技术在工业中的应用受到广泛青睐,因为它具有广泛的可用性和无污染的流体,因此有可能取代工业中的其他系统。在工业机器人领域,很少设计带有气动伺服电机的机械臂,因为对此的研究很少。该技术是一种带反馈的闭环重复控制系统,使其在工业过程中的实施成为可能。由于气动工业机器人很少,本研究旨在设计一个原型,通过运动学的解析对位置进行精确控制并降低气动系统的非线性随机性,这将为所需应用的气动伺服电机的机械调整提供必要的信息以及对传输模拟的解释。本研究提供了一个完全气动和功能齐全的机器人原型的制造模型,为未来应用于工业机器人的气动控制研究开辟了领域。
转子固定和便携式装配工具目录
反作用杆螺母扳手简介....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................8 气动非仪表手枪式螺母扳手.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... .10 带选择器气动非仪表手枪式拧紧扳手. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 气动非仪表直列式拧紧扳手 . . . . . . . . . . . . . . . . . . . . 14 可选设备 . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 .16