XiaoMi-AI文件搜索系统
World File Search System水下

水下机器人社区参与项目
School of Engineering ENGG 2900D School of Science SCIE 1090D School of Business and Management SBMT 2100H Course Title: Community Services Project: Underwater Robot Community Engagement Project Duration: Spring Semester, 2025 Project Introduction and Guideline This Project course (ENGG2900D/SCIE1090D/SBMT2100H) gives HKUST undergraduate students the opportunity to work in teams from different schools (i.e.seng/ssci/sbm),服务已确定的社区群体(即小学和中学生/南亚青年等。),了解对服务组的局限性,并学习如何应用水下机器人建造的理论知识。在整个项目中,HKUST本科生将充当讲习班的教师/助手,转移其水下机器人技能,帮助小学和中学生和/或南亚青年建立其原型。HKUST本科生还将在整个项目中学习活动管理的技能。i)主题
水下混凝土倒入和非隔离混凝土
13。报告类型和期间涵盖的最终报告2022年10月3日至3月14日。赞助代理代码15。补充注释16。桥梁子结构中的抽象水下混凝土放置通常会引起人们对具体质量的担忧,这主要是由于骨料隔离的潜力,尤其是在深钻孔中。认识到这些挑战,该研究项目的目的是批判性评估并建议对现有的威斯康星州运输部(WISDOT)政策,标准和规格进行有关水下混凝土放置的规格,以预防深入钻孔轴的骨料隔离。研究了相关研究以及其他运输部门(DOTS)以及建筑行业的实践,尤其是在海洋环境中运营的机构和公司。 此外,全国范围内的调查还分发给了50个州点的主要人员,以更好地了解当前的做法,趋势和常见困难。 本研究综合报告对混凝土放置技术进行了详细评估,基于桩的码头的构建方面的挑战,在基础中实现非隔离混凝土的策略以及材料的影响以及与施工相关的变量的影响。 基于获得的见解,该报告阐明了可用指南的改进,尤其是关于混凝土墩的建造和水生环境中的基台的指南。研究了相关研究以及其他运输部门(DOTS)以及建筑行业的实践,尤其是在海洋环境中运营的机构和公司。此外,全国范围内的调查还分发给了50个州点的主要人员,以更好地了解当前的做法,趋势和常见困难。本研究综合报告对混凝土放置技术进行了详细评估,基于桩的码头的构建方面的挑战,在基础中实现非隔离混凝土的策略以及材料的影响以及与施工相关的变量的影响。基于获得的见解,该报告阐明了可用指南的改进,尤其是关于混凝土墩的建造和水生环境中的基台的指南。
自主水下航行器的同伦约束路径规划
警告。获取和使用本博士论文的内容必须尊重作者的权利。它可以用于咨询或个人学习,也可以用于研究和教学活动或艺术术语中的材料。知识产权法综合文本(RDL 1/1996)第 32 条。如需其他用途,需事先征得作者明确授权。无论如何,在使用其内容时,必须注明作者姓名和博士论文题目。出于盈利目的对其进行复制或其他形式的利用,或从 TDX 服务以外的网站进行公开传播,均未经授权。也没有被授权在除 TDX(框架)之外的窗口或框架中呈现其内容。这种权利保留影响论文的内容及其摘要和索引。警告。获取和使用本博士论文的内容必须尊重作者的权利。它可以用于咨询或个人学习,也可以用于研究和教学活动或艺术术语中的材料。知识产权法综合文本(RDL 1/1996)第 32 条。如需其他用途,需事先征得作者明确授权。无论如何,在使用其内容时,必须明确注明编号和诉求

水下声学应用的高级分层复合结构
检测水下物体是最关键的技术之一,并且在海军战中开发复杂的声纳系统一直存在着努力。反对这样的努力,隐藏水下车辆,设备和武器的对策是另一个技术挑战。针对潜艇和其他水下物体(例如海军矿山)的声音检测的有效对策之一是使用复合/混合材料来防止易于检测。几何形式,形状和层,以及声学阻抗的调整,通过吸收声波波导致声纳信号大大降低。在这项研究中,开发了多层复合/杂种结构的原始和新颖设计,并在80 kHz-100 kHz频率范围内应用了水下声学测试程序。这项研究中获得的发现表明,具有多孔结构的多层复合/杂化材料的值比钢板的值要低得多,并且可能是潜在的候选物,作为水下矿山的覆盖和/或外壳材料,以减少在检测和识别识别的声学签名。

基于改进的Segformer的水下图像的语义分割
水下图像细分对于诸如水下探索,海洋环境监测和资源开发等任务至关重要。尽管如此,鉴于水下环境的复杂性和可变性,改善模型准确性仍然是水下图像分割任务中的关键挑战。为了解决这些问题,本研究提出了基于标准Segformer模型的水下图像的高性能语义分割方法。首先,Segformer中的混合变压器主链被Swin Transformer替换,以增强特征提取并促进对全局上下文信息的有效获取。接下来,在骨干的下采样阶段和解码器中引入了有效的多尺度注意(EMA)机制,以更好地捕获多尺度特征,从而进一步提高了细分精度。此外,将特征金字塔网络(FPN)结构合并到解码器中,以在多个分辨率下组合特征图,从而使模型可以有效地集成上下文信息,从而在复杂的水下环境中增强了鲁棒性。对SUIM水下图像数据集进行测试表明,拟议的模型在多个指标上达到了高性能:联合(MIOU)的平均相交(MIOU)为77.00%,平均召回(MRECALL)为85.04%,平均精度(Mprecision)为89.03%,为89.03%,F1Score(MF1Score(Mf1score)为86.63%)。与标准Segformer相比,MIOU的提高3.73%,MRECALL为1.98%,Mprecision的3.38%和MF1Score的2.44%的提高,参数增加了989万。结果表明,所提出的方法通过最小的其他计算实现了出色的分割精度,从而显示了水下图像分割中的高性能。
自动驾驶水下车辆-Matsya -IIT孟买
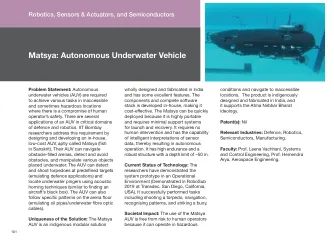
问题陈述:需要自动驾驶水下车辆(AUV)才能在无法访问人类操作员安全妥协的无法访问,有时甚至有害的位置实现各种任务。在国防和机器人技术的关键领域中有几种应用。bombay研究人员通过设计和开发内部,低成本的AUV,恰当地称为Matsya(梵语中的鱼)来解决这一要求。他们的AUV可以在充满障碍的竞技场,检测和避免障碍物,并操纵将各种物体放在水下。AUV可以以预定义的目标(模拟防御应用)检测和射击鱼雷,并使用声学归巢技术(类似于找到飞机的黑匣子)来定位水下平台。AUV还可以遵循竞技场地板上的特定图案(模拟油管/水下光纤电缆)。

礁石水下视频的3D计算机视觉
3D计算机视觉是ECEO的礁石水下视频,我们正在开发一种新方法来监视水下视频的珊瑚礁[2]。 来自跨国红海中心在以色列,约旦和吉布提的探险队的一部分收集的珊瑚礁地点的视频。 使用框架的语义分段对视频进行分析,并使用同时本地化和映射(SLAM)从访问的礁石站点创建3D点云,每个点都具有其RGB颜色及其语义类别(例如,>3D计算机视觉是ECEO的礁石水下视频,我们正在开发一种新方法来监视水下视频的珊瑚礁[2]。来自跨国红海中心在以色列,约旦和吉布提的探险队的一部分收集的珊瑚礁地点的视频。使用框架的语义分段对视频进行分析,并使用同时本地化和映射(SLAM)从访问的礁石站点创建3D点云,每个点都具有其RGB颜色及其语义类别(例如,岩石,沙子,活珊瑚,死珊瑚等)附件。可以收集此类视频的便利性有望通过数量级提高珊瑚礁监测方法的可伸缩性。

秘密长距离水下通信的加密计划
摘要 - 由于小包大小,经典数据保护方案不适合水下通信。本文解决了此问题,并包含两个主要结果。作为第一个结果,引入了一种适用于小消息大小的新的对称密钥加密协议。加密方案利用灵活的量子置换板(QPP)对称键块密码。它将QPP与块密码计数器模式和一个随机数生成器结合在一起,并带有共享秘密,以使QPP适应短的水下协议数据单位。加密和解密算法是定义的,在计数器模式下在QPP上构建。分析算法。分析表明该方案没有达到完美的不可区分性。但是,分析还表明消息碰撞概率可能非常低。该方案是通用和适应性的。作为第二个结果,新的对称加密方案适用于远程水下通信协议(发音您窃窃私语)UWSPR。与理论一致分析设计。还解决了相关的问题,例如关键大小和关键产生,以及水下环境所面临的挑战。关键字 - 水下通信,水下网络,安全性,机密性,加密,量子置换板,(发音您窃窃私语)UWSPR

无线自动实时水下声学定位系统
摘要:最近的声学遥测定位系统能够以几厘米至几米的规模重建生物体的位置和轨迹。但是,它们提出了几种后勤约束,包括接收器维护,校准程序和对实时数据的访问有限。我们在这里提出了一种基于到达的时间差异(TDOA)算法和全球移动(GSM)通信技术的新颖,易于人才,能量自我的水下定位系统,能够实时找到标记的海洋生物体。我们使用在鱼和底栖无脊椎动物中使用连续和编码标签的经验示例来说明该系统的应用。对操作系统的原位实验测试表现出与当前可用的声学定位系统相似的性能,全球定位误差为7.13±5.80 m(平均值±SD),三分之一的pINGS可以定位在远距离浮标的278 m内。尽管需要进行一些改进,但该原型的设计为自主,可以在各种环境(河流,湖泊和海洋)中从表面部署。事实证明,这对于实时监测各种物种(底栖和全骨)很有用。其实时属性可用于快速检测系统故障,优化部署设计或生态或保护应用。

用于水下通信的可部署声纳系统
1. 简介 可部署水下通信系统的需求涵盖许多应用,包括潜水员通信、通信寻呼机、主动声纳浮标、海洋哺乳动物通信系统、声学对抗措施和便携式研究系统。这些系统必须能够可靠地运行于长距离(30 海里)和短距离(5 海里)。所有这些系统都要求结构紧凑、能量存储和运行效率高。此外,通常还需要数据加密和宽带响应均衡滤波等专门功能。本文介绍了三种可部署水下通信系统。每个系统都有自己独特的功能,可针对特定应用量身定制。宽带声学传输系统 (BATS) 传输可听声学信号,用于海洋哺乳动物研究等应用。声学通信系统 (ACOMS-D/P) 是一种具有加密功能的远程通信寻呼机。这两个系统都使用桶板弯张换能器。可部署声纳系统 (DSS) 是一种便携式声纳系统,使用 Sensor Technology Limited 的 SQ09 换能器,工作频率为 24 kHz。本文介绍了系统组件、信号处理、系统配置和性能。