XiaoMi-AI文件搜索系统
World File Search System演示器

旋转空间站技术演示器
本文概述了旋转空间站大型技术演示器的设计。其目的有两个:获取有关大型旋转结构的行为、操作和控制的知识,为未来旋转空间站的设计提供参考;首次在地球轨道上模拟月球、火星、地球和其他太阳系的重力。该设计设想了一个桁架结构,形成一个圆形的开环,类似于一个巨大的呼啦圈。它摒弃了自行车车轮的方法,通过环的圆形结构而不是辐条和轮毂来解决旋转拉力。该环的临时总直径为 217 米,结构横截面积为 8 米。它以一系列角速度上下旋转以模拟不同的重力。微重力发生在静止时,地球重力发生在全速旋转时。低推力发动机提供旋转加速、旋转减速、姿态控制和驻留。光伏毯提供电力。六次发射可将整个技术演示器以存放的分段形式送入轨道,这些分段在地面控制下展开和组装。任务结束时,环将被拆除,其弯曲分段将转换为直梁,以供后续应用。关键词:技术演示器、旋转站、可展开结构、人造重力

管腔演示器 - 项目概述
dlrs太空推进研究所拥有与火箭发动机推室设计方面相关的实验研究的长期遗产。由于欧洲的传统关注欧洲的LOX/氢气推进系统,例如沟渠,HM-7B或Vinci,因此科学焦点被放在LOX和氢气的高压燃烧现象上。感兴趣的科学领域包括点火和瞬态,燃烧效率和动力学以及喷油器设计,燃烧室冷却,喷嘴流以及推力室结构和疲劳寿命。在欧洲研发测试台P8上使用各种测试标本进行了与高压燃烧相关的实验,该试验具有在代表典型火箭发动机的条件下进行测试的可能性[3]。自2014年以来,DLR也在涡轮机械领域建立能力。基于这些现有能力和测试功能,DLR于2017年启动了Lumen Bread Engine项目,其主要目标是:促进对发动机流程的理解,以系统级别展示能够预测
sizewell C氢演示器项目
应考虑其他许多基础设施项目,包括但不限于MV变电站,包装变压器和开关设备,SCADA,包括UPS,电气电缆,通信链路,消防探测器,消防探测面板,安全探测面板,安全面板,闪电保护,福利设施,福利设施,基础和围栏。SZB和SZC站点不适合示威者项目和站点周围的其他区域的位置,也可能被证明是不合适的。邀请供应商提出指示地点位置,SZC将讨论选址,并提供适当的电力和水的供应,包括其他物流,例如道路通道。对于示威者项目,SZC设想通过SZB的私人电线(接受进一步讨论)来提供电力。

多波段无源雷达演示器 - NATO STO
与传统的有源雷达系统相比,无源雷达系统利用外部环境中存在的大量射频发射信号,具有许多优势。这些优势包括通过使用第三方传输作为目标照明源,节省采购和运营成本,从而降低功率要求和隐蔽性。此类系统可用于军事监视以及民用应用,例如空域监视和地面监测。通常,此类系统使用通信、无线电或电视广播服务产生的射频发射。每个发射器在覆盖范围、功率水平和波形方面都有自己的特点。继使用电视传输进行前向散射雷达研究之后,BAE 系统先进技术中心设计并建造了一个用于无源传感器研究的演示系统。演示系统在多倍频程带宽上运行,可以配置为利用广播和通信系统的模拟和数字传输。这最大限度地提高了灵活性,并允许通过利用基于特定几何形状、覆盖范围、波形和目标特征的最佳雷达回波进行监视和跟踪。特别是,使用不同几何形状在不同波段进行多次观测将允许轨迹融合,从而实现比单波段系统更稳健、更准确的轨迹。本文概述了在演示器开发过程中解决的系统和设计问题,包括模拟模型、目标特征和与不同类型传输相关的权衡。显示了实验工作的结果,说明了演示系统对机会目标的运行情况。
多波段无源雷达演示器 - NATO STO
无源雷达系统利用外部环境中存在的大量射频发射信号,与传统的有源雷达系统相比具有许多优势。这些优势包括,通过使用这些第三方传输作为目标照明源,可以节省采购和运营成本,从而降低功率要求和隐蔽性。此类系统可用于军事监视以及民用应用,例如空域监视和地面监视。通常,此类系统使用通信、无线电或电视广播服务产生的射频发射。每个发射器在覆盖范围、功率水平和波形方面都有自己的特点。继使用电视传输进行前向散射雷达研究之后,BAE 系统先进技术中心设计并建造了一个用于无源传感器研究的演示系统。演示系统在多倍频程带宽上运行,可以配置为利用来自广播和通信系统的模拟和数字传输。这最大限度地提高了灵活性,并允许通过利用基于特定几何形状、覆盖范围、波形和目标特征的最佳雷达回波来进行监视和跟踪。具体而言,使用不同几何形状在不同波段进行多次观测将允许轨迹融合,从而实现比单波段系统更稳健、更准确的轨迹。本文概述了在演示器开发过程中解决的系统和设计问题,包括模拟模型、目标特征和与不同类型传输相关的权衡。本文展示了实验工作的结果,说明了演示器系统对机会目标的运行情况。

用于互操作性的能力概念演示器...
1.2.1 本体定义 1-2 1.2.2 互操作性级别 1-3 1.2.3 可调自动化 1-4 1.2.4 多机器人协作 1-6 1.3 现有标准化举措分析 1-8 1.4 互操作性标准 1-9 1.4.1 服务集 1-9 1.5 互操作层:库 1-12 1.5.1 JAUSRobot 1-13 1.5.2 JAUS C2I 1-13 1.5.2.1 JAUS 车队处理器 1-14 1.5.2.2 JAUS 机器人处理器 1-14 1.5.2.3 通信管理 1-14 1.6 单个平台适配 1-15 1.6.1 ROS 到机器人节点 1-15 1.6.2 其他机器人适配器 1-16 1.7 现场验证:多机器人合作示例 1-18 1.7.1 合作式多阶段空中监视 1-19 1.7.2 空中侦察以进行可穿越性分析 1-19 1.7.3 受害者搜索 1-21 1.7.4 载体 1-23 1.7.5 通信中继 1-24 1.7.5.1 2015 年欧洲马拉松赛期间的空中、海上、地面合作 1-25 1.8 结论和致谢 1-26

下一代运载火箭航空电子设备演示器
此外,跟踪通信系统从以消息为中心的模型到以数据为中心的设计的演变似乎很有趣。在以消息为中心的架构中,通信系统无法识别其携带的消息中嵌入的数据。相反,以数据为中心的设计可以表示为全局虚拟数据库,应用程序可以访问它而不必担心系统的分布式方面。“智能遥测”概念也遵循这种以数据为中心的设计。例如,传感器可以以 100Hz 的频率获取数据,但只有当变化大于预定义的限制时才更新虚拟化数据,从而避免通信系统中的瓶颈点。

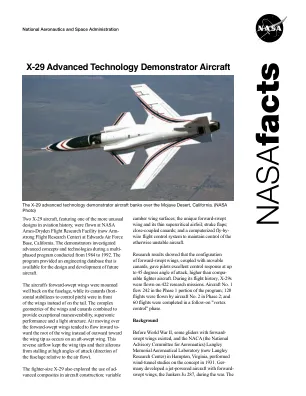
X-29高级技术演示器飞机
总体而言,VFC与前扫除的翅膀一样,对飞机设计的未来显示了希望。X-29并未证明早期研究表明的空气动力学阻力的总体减少。X-29程序确实展示了几种新技术以及已验证的技术的新用途,包括用于控制结构差异和使用相对较大的,近距离耦合的牛排进行纵向控制。此外,该计划还验证了对具有极端不稳定的飞机的控制,同时仍提供良好的处理质量;使用三表面纵向控制;以超音速速度使用双呈拖尾边缘flaperon;高攻击角度的控制有效性;涡流控制;和整体设计的军事效用。
