XiaoMi-AI文件搜索系统
World File Search System演示器

Bowen Nie、Zhitao Liu、Fei Cen、Duoneng Liu、Hongxu Ma 等。一种用于无尾飞机横向飞行品质调查的创新实验方法。IEEE Access,2020 年,第 8 期,第 109543-109556 页。�10.1109/ACCESS.2020.3001913�。�hal-02917902�
摘要 无尾飞机固有偏航控制功率有限和方向稳定性差的缺点。为了在低成本和低风险的无尾配置早期设计过程中解决这些问题,本文提出了一种创新的实验方法,将动态缩放模型安装在风洞中的三自由度装置上,以验证控制律并定量评估飞行品质。推导了无尾演示器在装置上的运动方程,然后对装置约束模型和自由飞行模型的横向飞行动力学进行了比较。根据缩放修正的飞行品质标准,完成了偏航和滚转运动控制增强系统的构建。通过在不同空速和攻角下的稳定飞行员在环飞行证明了所设计的控制律的有效性。通过应用多步机动进行低阶等效系统辨识来评估所实现的闭环飞行品质。尽管在开环情况下偏航会表现出严重的不稳定性,但在低攻角下,荷兰滚模式的闭环飞行品质可以提高到 1 级。
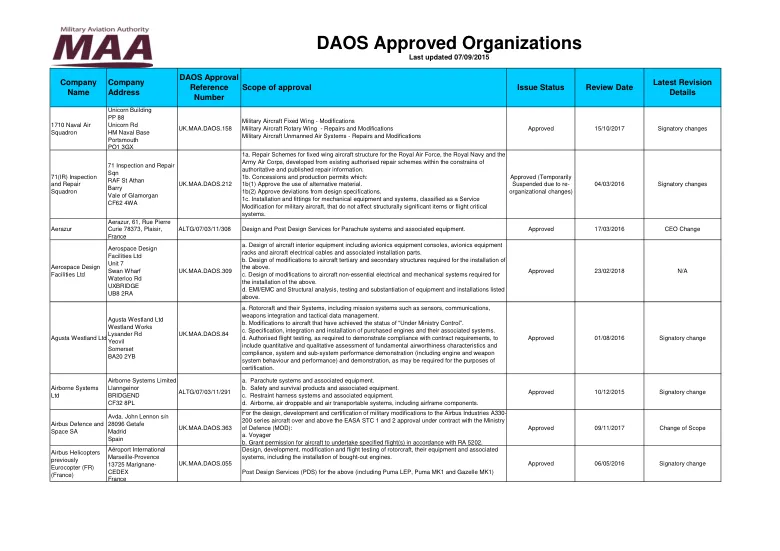
DAOS 批准组织 - GOV.UK
1.a 控制系统:飞机储备管理系统;飞行控制系统 (FCS),包括襟翼和缝翼控制计算机、机电控制杆(主动和被动)和油门(控制杆);电动执行系统。1.b 显示系统:平视显示器;头盔显示系统;夜视镜;用于平视显示器和头盔应用的机载摄像机;机组人员保护设备、任务和任务规划计算机,包括便携式数据存储器;显示生成器;地图生成器和显示器;低头显示器和机载摄像机。1.c 准备和维持 – 传统产品:空中数据系统和燃油管理系统。1.d 由 1.a 中列出的一个或多个系统的集成组件组成的系统。– 1.c 1.e 1.a 中列出的系统范围内的新技术演示器和实验设备。- 1.c f. 1.f 1.a 所列设备的测试和支持系统。- 1.e.1.g 更新能力、支持、维修(有设计元素时),包括 1.a - 1.c 和 1.f 所涵盖项目的后期设计服务。

商用飞机数据总线的实用方法
MIL-STD-1553 是一项成熟的、经过现场验证的技术,可为新兴的商业航空航天应用提供理想的解决方案。DDC 正在基于这项成熟的技术提供各种解决方案。 DDC 提议:1. MIL-STD-1553 现有的 1 Mbps 组件解决方案具有 1 亿飞行小时的使用历史,现已可供使用 2. TTP 1553 现有的 4 Mbps 技术演示板 更新现有的收发器组件以支持这种更高的速度,并与现有的 TTP 控制器一起封装成一个集成的多芯片模块 3. Turbo 1553 目前在实验室中以 3 到 5 Mbps 运行的具有 MIL-STD-1553 物理和协议层的技术演示器 更新现有的收发器和协议组件以支持这种更高的速度 4. HyPer-1553 目前已有支持 40 到 200 Mbps 的飞行用技术演示 PMC 缩小尺寸并将现有的双宽 PMC 转换为更小的电路板产品

利用纠缠光子违反 CHSH 不等式
2022 年诺贝尔物理学奖授予了阿斯派克特 (Aspect)、克劳泽 (Clauser) 和蔡林格 (Zeilinger),以表彰他们“对纠缠光子的实验,证明了贝尔不等式的违反并开创了量子信息科学” [1]。在本文中,我们描述了我们自己使用纠缠光子违反 CHSH 不等式(一种贝尔不等式)的实验。我们使用 qutools quED 纠缠演示器仪器通过自发参量下转换产生纠缠偏振光子。我们测量了旋转基底中的光子偏振,并计算出纠缠光子的 CHSH 相关值 | S | = 2.123±0.030>2 和非纠缠光子的 | S | <2。我们还生成了非经典相关曲线,描述了纠缠和非纠缠光子在连续偏振器角度范围内的偏振测量巧合。我们的结果证明了纠缠的非局域性,并阐明了对光子对极化测量的非经典相关性的更好的理解。
Kilopower 项目:KRUSTY 裂变发电实验和潜在任务
摘要 — 千瓦级项目由美国宇航局的空间技术任务理事会/游戏规则改变者发展计划于 2015 财年发起,旨在展示小型空间裂变动力在相关环境(技术就绪水平 5)下的子系统级技术就绪情况,以满足空间科学和载人探索的能源需求。千瓦级项目的核心是采用斯特林技术的千瓦级反应堆 (KRUSTY) 测试,该测试包括开发和测试 1 千瓦(电)级裂变动力系统 (FPS) 的地面技术演示器。KRUSTY 将开发和验证的技术可扩展至 1 至 10 千瓦(电)的空间 FPS,从而可以为载人探索提供模块化地面 FPS,以及未来潜在的更高功率的深空科学任务。KRUSTY 演示由美国宇航局和美国能源部国家核安全局共同资助。国家关键实验研究中心装置装配设施的KRUSTY演示于2018年第一季度完成。
负责任的道德 AI 演示者的要素......
摘要 — 为了在这个日益脆弱的世界中保护共同的文化遗产、个人自由和法治,民主国家必须能够在必要时“以机器速度”保卫自己。因此,人工智能在国防中的使用包括负责任的武器交战以及后勤、预测性维护、情报、监视或侦察等军事用例。这就提出了一个永恒的问题:如何根据公认的事实做出正确的决定?为了找到答案,负责任的可控性需要转化为系统工程的三个任务:(1)以人类在心理和情感上能够掌握每种情况的方式设计人工智能自动化。(2)确定技术设计原则,以促进人工智能在国防中的负责任使用。(3) 保证人类决策者始终拥有充分的信息、决策和行动选择优势。这里为防空提出的道德人工智能演示器 (E-AID) 正在铺平道路,让士兵尽可能真实地体验人工智能在瞄准周期中的使用以及相关的压力方面。
比较和应用电池建模方法用于概念电气
对电气化飞机推进概念的设计和优化越来越兴趣促使需要准确,灵活和有效的方法来建模电池系统。是在NASA的Glenn研究中心使用的三种电池建模方法,每个方法都代表不同的数学或电气方法。比较X-57 Maxwell Electric Aircraft技术演示器的电池电池测试数据进行比较。然后使用NASA的六乘客电动四极管概念在简单的多学科优化上下文中应用这些方法,以确定其适用性和性能。归一化方法对于稳定和不稳定的放电率的最高准确性,平均误差百分比分别为0.423%和1.186%。模型之间的最佳四极管任务范围最高为0.5 NMI,将当前的电池建模方法识别为任务分析错误的潜在重要贡献者。在本文中确定了一组相关的工具和概念电池建模的技术,并得出了针对各种设计挑战的每种建模方法的实用性得出的结论。
每月时事2024年5月IIA
名为“ Agnibaan Sorted”的火箭(亚轨道技术演示器)是印度首个由本地设计和制造的半晶发动机驱动火箭发射。火箭是由印度第一个私人开发的发射台发射的名为“ Dhanush”,由Agnikul在安得拉邦的Sriharikota建立。测试飞行旨在展示内部和本土技术,收集至关重要的飞行数据,并确保Agnikul轨道发射车“ Agnibaan”系统的最佳功能。这样,Agnikul成为了在Skyroot Aerospace之后在太空中发射火箭的第二家印度私人公司。agnibaan是具有插件配置的分类。插件配置意味着可以根据要带到太空的卫星来扩展火箭或缩小火箭。agnibaan是两阶段的火箭,其能力最高300公斤至700公里。火箭发动机由液体氧或煤油提供动力。它可以访问低压和高压轨道,并且完全移动,旨在访问10个以上的启动端口。11。国防研究与发展组织(DRDO)已成功进行了驾驶测试

法医 HPM 检测系统
电子设备的正常运行可能会因系统中引入过多能量而受到干扰,无论是通过电缆传输的信号还是自由传播的高功率电磁波。由于随后发生的错误模式(如系统崩溃)很难追溯到其根本原因,因此,检测系统可以提高对关键设施中异常强场强环境的认识,从而为有效的缓解措施提供信息。我们自行设计的实验室演示器可以测量高达每米几千伏的干扰信号,根据对脉冲取平均值时低至几兆赫兹精度的频率测量,校正窄带信号中所有组件的频率响应。额外获取的元数据(如时间分辨率低至 10 纳秒的信号包络和其他测量的脉冲串特性)可用于信号取证。四通道设计可以检测传入信号的方向。边长为 19 厘米的立方体探测器可以使用电池运行 10 小时,光纤网络连接允许浏览器访问其 Web 界面。
无尾飞机横向飞行品质调查的创新实验方法
摘要 无尾飞机固有的偏航控制功率有限和方向稳定性差的缺点。为了在低成本和低风险的无尾配置早期设计过程中解决这些问题,本文提出了一种创新的实验方法来验证控制律并定量评估飞行品质,该方法使用安装在风洞中三自由度试验台上的动态缩放模型。推导了试验台上无尾演示器的运动方程,然后对试验台约束模型和自由飞行模型之间的横向飞行动力学进行了比较。根据缩放修正的飞行品质标准,完成了偏航和滚转运动控制增强系统的构建。通过在不同空速和攻角下的稳定飞行员在环飞行证明了所设计的控制律的有效性。通过应用多步机动进行低阶等效系统辨识来评估所实现的闭环飞行品质。尽管在开环情况下偏航会表现出严重的不稳定性,但荷兰滚模式的闭环飞行品质在低攻角下可以提高到 1 级。