XiaoMi-AI文件搜索系统
World File Search System灵活的

通过能力感知共享超网络学习灵活的异构协调
合作性异构多智能体任务要求智能体以灵活和互补的方式行事,以最大程度地利用其多样化能力。针对这一挑战的基于学习的解决方案涵盖两个端点之间的范围:i)共享参数方法,通过为每个智能体分配一个 ID,在单一架构内编码多样化行为,这种方法样本效率高,但行为多样性有限;ii)独立方法,为每个智能体学习单独的策略,以样本和参数效率为代价实现更大的多样性。先前针对异构多智能体团队学习的研究已经探索了这一范围的中间地带,即为不同类别的智能体学习共享参数或独立策略,从而在多样性和效率之间实现折衷。然而,这些方法仍然没有推理智能体能力对行为的影响,因此不能推广到未知的智能体或团队组成。受到迁移学习和元强化学习最新研究的启发,并在基于特征的任务分配的先前研究的基础上,我们提出了能力感知共享超网络 (CASH),这是一种用于异构协调的新型软权重共享架构,它使用超网络明确推理持续代理能力和局部观察。直观地说,CASH 允许团队学习共享的决策策略(由共享编码器捕获),这些策略可以通过共享超网络根据团队的个人和集体能力轻松调整。我们在两个异构协调任务和三个标准学习范式(模仿学习、基于价值和策略梯度强化学习)中进行了详细的实验,展示了我们的设计如何与底层学习范式无关。结果表明,CASH 产生了适当多样化的行为,在训练和零样本泛化期间的任务性能和样本效率方面始终优于基线架构。值得注意的是,CASH 仅使用基线使用的 20% 到 40% 的可学习参数就实现了这些改进。我们所有的代码都可以在 https://github.com/kfu02/JaxMARL 上找到。

时间 - 在健康和成人社会护理部门的安全和灵活的工作
1。通过设计照顾(TimeWise 2017)https://timewise.co.uk/article/car- ing-by-design/2。Improving joy at work – electronic self-rostering (The Royal Free Lon- don NHS Foundation Trust) https://www.england.nhs.uk/looking-af- ter-our-people/the-programme-and-resources/we-work-flexibly/ improving-joy-at-work-electronic-self-rostering-the-royal-free-london-nhs- foundation-trust/ 3.https://timewise.co.uk/article/how-shift in-suest-innovation-boost- ed-ed-one-trusts-midwifery-capacity/4.https://timewise.co.uk/wp-content/uploads/2021/10/suits-you-hifts--sace-study.pdf 5。https://pubmed.ncbi.nlm.nih.gov/38582024/

FlexType:使用少量输入手势实现灵活的文本输入
在许多情况下,通过选择物理或触摸屏键盘上的精确位置来输入文本可能是不切实际的或不可能的。我们提出了一种具有四个字符组的歧义键盘,它可以用于免眼文本输入,以及使用单个开关或脑机接口的文本输入。我们开发了一种基于利用长跨度语言模型的消歧算法来优化这些字符分组的程序。我们在离线优化实验中生成了字母约束和不受约束的字符组,并在纵向用户研究中对它们进行了比较。经过四个小时的练习,我们的结果没有显示约束和不受约束的字符组之间有显著差异。如预期的那样,参与者在第一次训练中对不受约束的组的错误率明显更高,这表明学习这项技术的门槛更高。因此,我们推荐使用字母限制的字符组,参与者能够用单手且在没有视觉反馈的情况下实现每分钟 12.0 个单词的平均输入速度,字符错误率为 2.03%。
面向智能微电网控制的可扩展、灵活的仿真和测试环境工具箱
摘要 — 微电网和智能电网 (MSG) 在将可再生能源整合到传统电网以及为偏远地区提供电力供应方面发挥着重要作用。现代 MSG 因其高效率和灵活性而主要由电力电子转换器驱动。然而,由于对各种不同 MSG 拓扑的能源可用性、安全性和电压质量的要求最高,控制 MSG 是一项具有挑战性的任务。这导致在开发阶段对新控制概念进行全面测试并与最新技术进行比较以确保其可行性的需求很高。这尤其适用于基于强化学习 (RL) 的数据驱动控制方法,其稳定性和操作行为很难先验评估。因此,提出了 OpenModelica Microgrid Gym (OMG) 包,这是一个用于模拟和控制优化 MSG 的开源软件工具箱。它能够对任意 MSG 拓扑进行建模和模拟,并提供基于 Python 的即插即用控制器测试接口。尤其是标准化的 OpenAI Gym 接口可轻松实现基于 RL 的控制器集成。除了介绍 OMG 工具箱外,还重点介绍了几个应用示例,包括用于低级控制器调优的安全贝叶斯优化。

认知灵活性是通过灵活的神经表现形式转移大脑网络流动
我们克服习惯反应以支持目标驱动的新颖反应的能力取决于额叶认知控制网络(CCN)。最近和正在进行的工作正在揭示大脑网络和信息过程,这些过程允许CCN产生认知灵活性。首先,最近发现对与目标相关表示的灵活维护和操纵所必需的工作记忆过程取决于CCN区域内的短期网络可塑性(与持续活动相反)。第二,构图(即摘要和可重复使用的)在CCN中维持的规则表示形式已被发现将网络活动从刺激转移到响应,从而实现了灵活的行为。一起,这些发现表明,通过CCN协调的网络机制来增强认知灵活性,利用神经表示和网络流的组成重用来灵活地实现任务目标。

使用能力感知共享超网络学习灵活的异构协调
合作的异构多智能体任务要求智能体以灵活和互补的方式行事,以最大限度地利用其多样化的能力。针对这一挑战的基于学习的解决方案涵盖两个端点之间的范围:i)共享参数方法,通过为每个智能体分配一个 ID,在单一架构内编码不同的行为,这种方法具有样本效率,但行为多样性有限;ii)独立方法,为每个智能体学习单独的策略,以样本和参数效率为代价实现更大的多样性。先前针对异构多智能体团队的学习工作已经通过学习智能体类别的共享参数或独立策略探索了这一范围的中间地带,从而允许在多样性和效率之间进行折衷。然而,这些方法仍然没有推理智能体能力对行为的影响,因此不能推广到看不见的智能体或团队组成。受到最近迁移学习和元强化学习研究的启发,并在基于特征的任务分配的先前研究的基础上,我们提出了能力感知共享超网络 (CASH),这是一种用于异构协调的新型软权重共享架构,它使用超网络明确推理持续代理能力和局部观察。直观地说,CASH 允许团队学习共享的决策策略(由共享编码器捕获),这些策略可以通过共享超网络根据团队的个人和集体能力轻松调整。我们对两个异构协调任务和三个标准学习范式(模仿学习、基于价值和策略梯度强化学习)进行了详细的实验,展示了我们的设计如何与底层学习范式无关。结果表明,CASH 生成了适当多样化的行为,在训练和零样本泛化过程中,其任务性能和样本效率始终优于基线架构。值得注意的是,CASH 仅使用基线使用的可学习参数的 20% 到 40% 就实现了这些改进。我们所有的代码都可以在 https://github.com/kfu02/JaxMARL 上找到。

基于市场的可再生能源:灵活的氢电解器如何稳定风和太阳能市场价值
摘要。风能和太阳能通常会成为自己成功的受害者:他们在电力生产中的份额越高,电力市场的收入就越多(其“市场价值”)下降。尽管在常规电力系统中,市场价值可能会融合到零,但这项研究表明,通过在低价小时内增加电力需求,“绿色”氢的产量可以有效,永久地停止下降。具有分析推导,蒙特卡洛模拟和数值电力市场模型,我发现 - 由于柔性氢的产量 - 2050年的市场价值可能会在太阳能中收敛于19±9 MWH -1,而风能的27±8 mWH -1超过27±8 mWh -1。这是可再生能源预计的级别成本范围的,并且具有深远的影响。基于市场的可再生能源可能会触及。

灵活的压电/自pacacivel Hybrid Force和接口传感器与接口协作机器人
摘要 - 力和接近传感器是机器人技术的关键,尤其是在与人类在实际非结构化环境中与人进行物理或认知互动的协作机器人应用时。但是,用于机器人技术的大多数现有传感器都受到以下限制:1)它们的范围,测量单个参数/事件,并且通常需要多种类型的传感器; 2)制造昂贵,将它们的用途限制为严格必要的,并且通常会损害冗余; 3)具有无效或降低的物理灵活性,需要适应各种机器人结构的进一步成本。本文提出了一种基于压抑和自态现象的新型机械功能和接近杂种传感器。传感器即使在复杂形的机器人结构上,传感器也易于应用。描述了制造过程,包括控制电路,机械设计和数据采集。具有传感器表征的实验性三个体系,重点是力 - 电阻和自paCaCaCACIAL距离响应。传感器的多功能性,灵活性,薄度(厚度为1毫米),准确性(降低的漂移)和可重复性证明了其在多个域中的适用性。最后,传感器在两种不同的情况下成功地介绍了:手工引导机器人(通过触摸命令)和人类 - 机器人碰撞避免(通过接近性检测)。

使用灵活的学习策略来促进公平和包容的教育机会
就像美国各地的地区一样,弗吉尼亚州劳登县的劳登县公立学校不得不快速过渡到远程学习,以响应Covid-19-19。该地区以前曾致力于在物理课堂上实施学习机会的方法 - 使用可调节的座位和空间,以鼓励更多的合作,灵活的学生组和基于项目的动手学习的机会。尽管这种灵活的方法并没有使向远程学习的过渡变得容易,但在Covid-19-19大流行之前的几年中,心态逐渐转变为灵活的教学有助于支持向远程学习的过渡。该地区指出,这些举措在大流行之前已经进行了,但是“病毒是一种加速器”,增强了对合作,建立关系,可访问技术以及与学生和家庭的互动的关键需求。
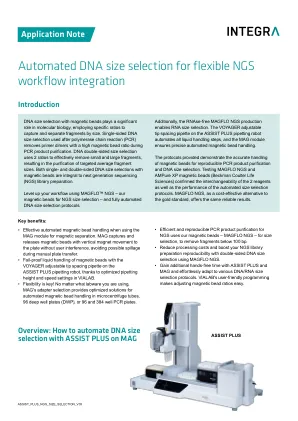
自动选择 DNA 大小,实现灵活的 NGS 工作流程集成
VOYAGER – 对每个样品使用新鲜的 GRIPTIPS – 将在磁体阵列保持接合的情况下去除上清液(图 5a)。然后,移液器将上清液转移到位置 A 的 INTEGRA DWP 的 FH 列中。缓慢抽吸(速度 1)和精确的高度设置可防止磁珠在清洗过程中丢失。然后用位置 A 的 INTEGRA DWP 的 B 列中的 125 µl 80% 乙醇清洗磁珠两次(图 2,绿色)。VOYAGER 将额外抽吸一次,以确保从每个孔中完全去除乙醇。MAG 会将磁体阵列降低 5 毫米至低位(低位,24 毫米),然后在室温下风干 3 分钟。在风干之前降低磁体阵列将使沉淀物更靠近孔底,从而更容易洗脱并减少体积。