XiaoMi-AI文件搜索系统
World File Search System移动机器人
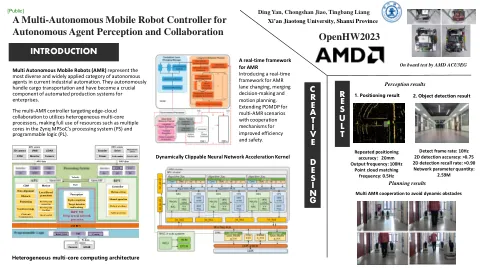
自治的多自主移动机器人控制器,用于自主剂感知和协作
多自动移动机器人(AMR)代表了当前工业自动化中自治药物的最多样化和广泛应用的类别。他们自主处理货物运输,并已成为企业自动生产系统的关键组成部分。

通过增强的PPO进行安全移动机器人导航的深度加固学习
摘要 - 无汇总运动对于移动机器人必不可少。大多数与车轮机器人无冲突和高效导航的方法都需要专家进行参数调整,以获得良好的导航行为。本研究调查了深入强化学习在复杂环境中训练移动机器人进行自动导航的应用。机器人利用激光雷达传感器数据和深度神经网络来生成控制信号,同时避免了障碍物。我们在凉亭仿真环境中采用两种强化学习算法:深层确定性政策梯度和近端政策优化。该研究在近端策略优化算法中引入了增强的神经网络结构,以提高性能,并具有精心设计的奖励功能,以提高算法效率。在障碍物和自由环境中进行的实验结果强调了拟议方法的有效性。这项研究通过应用深度强化学习,很大程度上有助于在复杂环境中提高自主机器人技术。索引术语 - 深处增强学习,自主航行,控制,避免障碍
带有机械手和计算机视觉的微型温室浇水自主移动机器人原型
摘要。开发能够代替人类执行智力劳动的浇水自主移动机器人是机器人和生物信息学领域的一项紧迫任务。这些机器人可广泛应用于精准农业以节约资源,特别是在最佳植物灌溉领域。在全球城市化的背景下,本研究致力于开发用于微型温室的浇水自主移动机器人。该机器人集成了微电子和微自动化系统。创建了一个配备机械手和计算机视觉系统的原型机器人。开发的灌溉计划和种植方法可以高效利用资源,提高作物产量并降低劳动力成本。这种方法对城市农业具有重要的实用价值。

移动机器人的快速适应和持续学习尖峰神经网络路径计划算法
摘要 - 基于此地图的环境和计划途径中的遍历成本对于自主航很重要。我们提出了一种神经动物导航系统,该系统利用尖峰神经网络(SNN)波前策划者和电子企业学习同时绘制和计划路径在大而复杂的环境中。,我们结合了一种新颖的映射方法,当与尖峰波前计划器(SWP)结合使用时,通过选择性地考虑任何成本组合,可以进行自适应计划。该系统在室外环境中具有障碍物和不同地形的室外环境中进行测试。结果表明,该系统能够使用三种成本量度,(1)轮子的能量消耗,(2)在存在障碍物的情况下花费的时间以及(3)地形斜率。在仅十二个小时的在线培训中,电子prop通过更新SWP中的延迟来学习并将遍历成本纳入路径计划地图。在模拟路径上,SWP计划比A*和RRT*明显短,成本较低。SWP与神经形态硬件兼容,可用于需要低尺寸,重量和功率的应用。

SIM到真实的移动机器人导航策略,从虚拟眼睛的视觉中学习
摘要 - 恰好在具有最小碰撞的无构建环境中引导软机器人仍然是软机器人的开放挑战。当环境未知时,可能无法用于模拟和操作的导航的事先运动计划。本文提出了一种新颖的SIM到真实方法,可在模拟开放框架体系结构(SOFA)下的静态环境中指导电缆驱动的软机器人。SCE-NARIO的目的是在简化的横向气管插管过程中类似于其中一个步骤,在该过程中,机器人气管管由灵活的视频辅助内窥镜/stylet引导到上层气管larynx位置。在沙发中,我们采用二次编程逆求器来获得基于机器人模型的内窥镜/Stylet操纵的无碰撞运动策略,并编码与眼睛的视觉。然后,我们使用闭环非线性自动回收前模型(NARX)网络将虚拟视觉和关节空间运动识别的解剖学特征与关节空间相关联。之后,我们将学习的知识转移到机器人原型中,期望它仅根据其眼睛的视觉自动自动地在新的幻影环境中导航到所需的位置。实验结果表明,我们的软机器人可以根据从虚拟环境中学到的知识,在最小的碰撞运动中有效地通过非结构化的幻影训练到所需的位置。结果表明,闭环NARX预测和由SOFA引用的机器人电缆和棱镜关节空间运动之间的平均R平均系数为0.963和0.997。眼神的视线还表现出机器人尖端和震颤之间的良好对齐方式。

使用线性季度调节器优化用于农业的轮式移动机器人的性能
使用轮式移动机器人系统的使用对于解决农业面临的一些未来问题至关重要。但是,车轮上的机器人系统目前不稳定,需要一种控制机制来提高稳定性,从而导致许多研究要求为轮式移动机器人系统开发适当的控制器算法。比例,积分,衍生(PID)控制器目前被广泛用于此目的,但是由于参数的破坏或波动,PID方法通常是不合适的。其他控制AP PRACHES,例如线性季度调节器(LQR)控制,可用于解决与PID控制器相关的一些问题。在这项研究中,开发了四轮滑动移动机器人的运动学模型,以测试LQR控制的功能。使用轮式移动机器人的特征检查了三种情况(控制廉价的,非零州昂贵;控制昂贵的,非零州廉价;仅非零州昂贵)。基于这些方案的廉价控制时间的高峰时间,定居时间和上升时间分别为0.1 s,7.82 s和4.39 s。

移动机器人的灵活路径计划使用模糊控制器避免动态障碍
摘要 - 机器人越来越多地用于服务和工业活动。在过去的几十年中,它的导航一直是世界上研究人员的空缺问题。这项研究的目标是为在具有静态和移动障碍的动态和未知环境中运行的移动机器人开发控制方法。该方法利用基于激光雷达传感器的模糊逻辑方法来收集有关环境的信息并做出导航的决策。该研究重点是在材料处理应用中使用移动机器人,例如仓库或具有平坦地板的库。结果证明了所提出的方法在静态和移动障碍物周围导航移动机器人的能力,从而在各种材料处理应用中使用。该研究为复杂环境中移动机器人导航的开放问题提供了潜在的解决方案。关键字 - 模糊控制器,移动机器人,车轮机器人,路径规划,轨迹

一种基于计算机视觉的方法,用于收集移动机器人探针的地面真相
摘要:随着人工智能和嵌入式硬件开发的发展,对移动机器人的各种自主导航方法的利用变得越来越可行。因此,已经出现了对这些运动方法的鲁棒验证方法的需求。本文介绍了一种依靠计算机视觉的新颖地面真相定位收集方法。在这种方法中,摄像机被定位在上面,以通过计算机视觉技术来检测机器人的位置。与其他传感器的数据同步收集用于检索定位地面真相的图像。通过将摄像机派生的位置视为地面真理,可以进行比较分析以开发,分析和测试不同的机器人探视方法。除了在本文中提出地面真相收集方法外,我们还使用DNN比较使用来自不同传感器的数据作为输入进行探测。结果证明了我们的地面真相收集方法在评估和比较移动机器人的不同探光法方面的功效。这项研究通过提供可靠且多功能的方法来评估和比较探针技术,这对于开发和部署自主机器人系统至关重要,从而为移动机器人技术领域做出了贡献。
布局概念的自动化和机器人技术开发...
具有提高越野能力的小型移动机器人布局的新概念的发展是由于各个领域的许多现代挑战和趋势。首先,在不断增加的城市化和越来越多的城市物体(例如步骤,楼梯和不平坦的表面)的背景下,可以有效地使用高流量移动机器人在各种环境中执行任务。其次,与在自主系统中的应用扩展相关,例如在运输,医学和研究领域,小型移动机器人的出现成为这一开发的组成部分。能够穿透难以到达的地方并在有限空间的条件下移动的能力使他们能够执行难以使用传统方法解决的任务。第三,在提高对各个领域任务性能效率和速度的要求,包括生产和维护,高流量移动机器人布局的开发可以极大地促进常规操作并确保更有效地利用资源。总而言之,开发了小型移动机器人布局的新概念,旨在增加交通,满足现代社会的要求,并为改善各个行业的自主系统提供了广泛的机会[1-4]。

自动移动机器人的概念,用于自动化高湾仓库中的运输任务
摘要该行业的发展,以及运营效率的不断提高和生产成本的降低,为在存储和运输系统领域中的新颖解决方案铺平了道路。新技术和解决方案(例如移动机器人)的结合已达到建立智能仓库。它有助于减少非价值的公司添加活动。提高此类系统效率的方法之一是更有效地利用自动移动机器人。本文提出了一个自主移动机器人的创造性概念,该机器人能够在商店地板和高湾仓库中执行运输任务。驱动机制的新概念使其能够在表面上导航并沿铁路指南移动。通过使用电梯,可以将机器人提升到仓库内的更高级别。机器人的结构解决方案良好,可以在仓库内的任何地方放置电梯的位置,从而消除了构造坑的需求。与提议的结构一起使用移动机器人将使执行运输任务无需重新加载。这种方法有可能提高效率并降低存储过程的成本。