XiaoMi-AI文件搜索系统
World File Search System稀疏
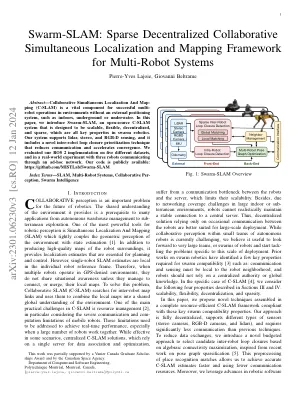
Swarm-Slam:多机器人系统的稀疏分散协作同时本地化和映射框架
摘要 - 合并同时定位和地图(C-SLAM)是在没有外部定位系统(例如室内,地下或水下)中成功多机器人操作的重要组成部分。在本文中,我们引入了Swarm-Slam,这是一种开源C-Slam系统,旨在可扩展,灵活,分散和稀疏,它们都是Swarm Robotics的关键特性。我们的系统支持LIDAR,立体声和RGB-D传感,它包括一种新型的机器人间环关闭优先级技术,可降低通信并加速收敛。我们在五个不同的数据集上评估了我们的ROS 2实现,并在通过临时网络通信的三个机器人的现实实验中评估了我们的ROS 2实现。我们的代码公开可用:https://github.com/mistlab/swarm-slam

MTERT诱导P21阳性细胞抵抗毛细血管稀疏和肺肺气肿
包括包括:(1)C9ORF72六核苷酸载体(“ C9POS”),(2)对ALS相关的遗传变体和(3)IntermedMedMediepent Lengent Regent Legents cagnucletiers at actx Atxn的结果,总共包括113个健康对照和212个具有ALS的遗传分层个体:(1)C9ORF72六核苷酸载体(“ C9POS”),(2)偶发测试的患者。絮凝叶(p adj = 0.014,95%ci-5.06e-5至 - 3.98e-6)和crura(p adj = 0.031,95%ci-1.63e-3至 - 1.63e-3至 - 5.55e-5)在基线的基线患者的基线减少。小脑额和小脑结构连通性障碍,并且在零星患者中,这两种投影随着时间的流逝而进一步恶化(P ADJ = 0.003,T(249)= 3.04 = 3.04和P AXJ = 0.05,T(249),T(249),T(249)= 1.93)。基线零星患者的功能性小脑解偶联(P ADJ = 0.004,95%CI -0.19至-0.03)。ATXN2患者在基线时表现出脑部 - 枕骨功能连通性的降低(P ADJ = 0.004,95%CI-0.63至-0.06),进行性脑静脉内暂时性功能断开连接(P ADJ = 0.025,T(199)= -2.26)= -2.26),pecl = 0.0 7 (249)= - 2.24)。C9POS患者表现出进行性腹侧齿状萎缩(P ADJ = 0.007,t(249)= - 2.75)。CSTS(p adj <0.001,95%CI 4.89E-5至1.14E-4)和跨卡盘间纤维纤维(P ADJ <0.001,95%CI 5.21E 5.21E-5至1.31E-4)在C9POS和基线的效果均高于4次,比4次高于4时间。CST和callosum callosum完整性的下降速度快于脑脑断开连接的速度(P ADJ = 0.001,T(190)= 6.93)。

树突正常化可改善稀疏连接的人工神经网络中的学习
。CC-BY-NC-ND 4.0 国际许可证(未经同行评审认证)是作者/资助者,他已授予 bioRxiv 永久展示预印本的许可。它是由此预印本的版权持有者于 2020 年 1 月 15 日发布的。 ;https://doi.org/10.1101/2020.01.14.906537 doi:bioRxiv 预印本

在潜在空间上实施稀疏性,以促进可靠和可解释的表示
最近,密集的潜在变量模型已显示出令人鼓舞的结果,但是它们的分布式和潜在的代码使它们降低了易于解释,并且对噪声的影响较低。另一方面,稀疏表示更为简约,提供了更好的解释性和噪声稳健性,但是由于涉及的复杂性和计算成本,很难实现稀疏性。在此过程中,我们提出了一种新颖的无监督学习方法,以利用逐渐稀疏的尖峰和平板分布作为我们的先验,以在发电机模型的潜在空间上强化稀疏性。我们的模型由自上而下的发电网络组成,该网络将潜在变量映射到观测值。我们使用最大似然采样来推断发电机后方向的潜在变量,并且推理阶段的尖峰和平板正则化可以通过将非信息性潜在维度推动到零来引起稀疏性。我们的实验表明,学到的稀疏潜在表示保留了大多数信息,我们的模型可以学习解开的语义,并赋予潜在代码的解释性,并增强分类和denosing任务的鲁棒性。
最优功率流导出的稀疏线性求解器基准
由于电网的变化性质,能够在大型电网中求解高保真最优潮流模型变得越来越重要。这种高保真问题称为交流最优潮流 (ACOPF),是一个非线性、非凸优化问题。解决此类问题的少数可靠方法之一是内点法。这些方法会产生稀疏线性系统,其中系数矩阵是对称的、不确定的并且通常是病态的。因此,它们对于稀疏线性求解器来说尤其具有挑战性,并且代表了求解 ACOPF 问题时相当大的计算瓶颈。在本文中,我们介绍了一个线性系统存储库,该存储库由开源优化器 IPOPT 求解 ACOPF 问题时捕获。这些矩阵旨在用作稀疏线性求解器开发的测试套件。

基于传感器相关性情绪识别分类的稀疏Granger因果关系分析模型
近年来,基于脑电图(EEG)数据的情感计算吸引了人们的注意力越来越多。作为经典的EEG特征提取模型,Granger因果关系分析已被广泛用于情感分类模型,该模型通过计算EEG传感器之间的因果关系并选择关键的EEG特征来构建大脑网络。传统的EEG Granger因果关系分析使用L 2规范从数据中提取特征,因此结果容易受到脑电图的影响。最近,一些研究人员提出了基于绝对收缩和选择操作员(Lasso)和L 1/2规范的Granger因果关系分析模型来解决此问题。但是,常规的稀疏Granger因果关系分析模型假设每个传感器之间的连接具有相同的先验概率。本文表明,如果可以将每个传感器的脑电图数据之间的相关性添加到Granger因果关系网络中,则可以作为先验知识,则可以增强稀疏Granger因果模型的EEG特征选择能力和情感分类能力。基于这个想法,我们提出了一个新的情感计算模型,该模型将基于传感器相关(SC-SGA)的稀疏Granger因果关系分析模型。SC-SGA基于L 1 /2规范框架进行特征提取,将传感器作为先验知识之间的相关性与Granger因果关系分析,并使用L 2 Norm Logistic回归作为情感分类算法。我们使用两个真实的脑电图数据集报告了实验的结果。这些结果表明,SC-SGA模型的情绪分类准确性比现有模型的情绪分类精度高出2.46–21.81%。
基于压缩感知多通道脑电信号加速稀疏性重建
能够记录和传输生物信号的可穿戴电子设备可以提供便捷且普遍的健康监测。典型的脑电图记录会产生大量数据。传统的压缩方法无法将数据压缩到奈奎斯特速率以下,因此即使压缩后数据量仍然很大。这需要大量存储空间,因此传输时间也较长。压缩感知提出了解决这个问题的方法,并提供了一种将数据压缩到奈奎斯特速率以下的方法。本文提出基于双时间稀疏性的重建算法来恢复压缩采样的脑电图数据。通过使用schattern-p范数修改基于双时间稀疏性的重建算法并在处理前对脑电图数据进行去相关变换,进一步改善了结果。所提出的改进双时间稀疏性的重建算法在SNDR和NMSE方面优于基于块稀疏贝叶斯学习和Rackness的压缩感知算法。仿真结果进一步表明,所提出的算法具有更好的收敛速度和更短的执行时间。

使用稀疏的视觉观察在不平坦的地形上学习感知运动
摘要 - 为了主动浏览和遍历各种特征,主动使用视觉感知是必不可少的。我们旨在调查使用稀疏视觉观测值的可行性和性能,以在以人为中心的环境中在一系列常见的地形(步骤,坡道,间隙和楼梯)上实现感知运动。我们制定了适合在感兴趣地形上运动的稀疏视觉输入的选择,并提出了一个学习框架,以整合外部感受和本体感受状态。我们专门设计了状态观察和培训课程,以在各种不同的地形上有效地学习反馈控制政策。我们在各种任务中广泛验证和基准了学到的政策:在地面上行走的全向行走,并在各种障碍物上向前移动,显示出高成功的遍历率。此外,我们通过在新的看不见的地形上增加各种水平的噪声和测试来研究外观感受性消融并评估政策概括。我们证明了自主感知运动的能力,只能使用直接深度测量中的稀疏视觉观测来实现,这些观察值易于从激光雷达或RGB-D传感器中易于获得,在20厘米高度的高高高度上显示出强大的上升和下降,即20 cm的高度,即50%的腿长和强劲的腿部和稳健的噪声和Unigeseen anderseenseles anderseens anderseens anderseen anderseenseles anderseen anderseen sereen seleseen anderains ternales anderains。

具有仅姿势监督的显着稀疏视觉探子仪
摘要 - 视觉探测器(VO)对于自主系统的导航至关重要,以合理的成本提供准确的位置和方向估计。虽然传统的VO方法在某些条件下脱颖而出,但它们会面临诸如可变照明和运动模糊之类的挑战。深度学习的VO虽然更适应性,但在新环境中可能会面临概括问题。解决这些缺点时,本文提出了一种新型的混合视觉探光(VO)框架,该框架利用了姿势的超级视觉,提供了稳健性和对广泛标签的需求之间的平衡解决方案。我们提出了两种具有成本效益和创新的设计:一种自我监管的同谱预训练,用于从唯一的姿势标签中增强光流学习,以及一个随机的基于贴片的显着点检测策略,以进行更准确的光流贴片提取。这些设计消除了对训练的密集光流标签的需求,并显着提高了系统在多样化和挑战性环境中的概括能力。与密集的光学流程监督最终的最新方法相比,在极端和看不见的情况下,在极端和看不见的情况下,在标准数据集以及更大的鲁棒性和概括能力上实现了竞争性能。

边缘 AI 中分割计算的激活稀疏性和动态修剪
深度神经网络越来越大,因此更难在受限的物联网设备上部署。拆分计算提供了一种解决方案,即拆分网络并将前几层放置在物联网设备上。这些层的输出被传输到云端,然后继续进行推理。早期的研究表明中间激活输出具有一定程度的高稀疏性,本文分析并利用激活稀疏性来减少将中间数据传输到云端时的网络通信开销。具体来说,我们分析了 CIFAR-10 和 ImageNet 上 ResNet-50 中两个早期层的中间激活,重点关注稀疏性以指导选择分割点的过程。我们对激活和特征图进行了动态修剪,发现稀疏性非常依赖于层的大小,权重与卷积层中的激活稀疏性无关。此外,我们表明,稀疏中间输出可以压缩 3.3 倍,准确度损失 1.1%,无需任何微调。当添加微调时,压缩系数增加到 14 倍,总体准确度损失为 1%。