机构名称:
¥ 1.0
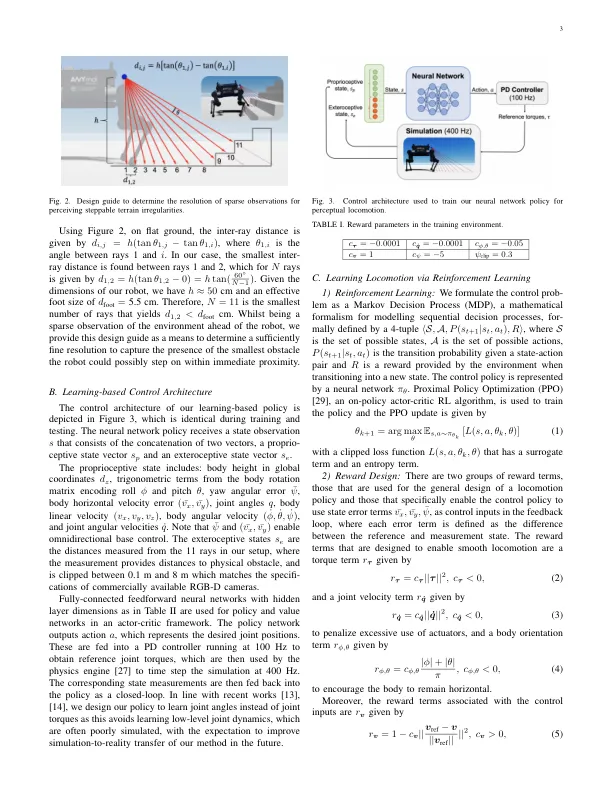
摘要 - 为了主动浏览和遍历各种特征,主动使用视觉感知是必不可少的。我们旨在调查使用稀疏视觉观测值的可行性和性能,以在以人为中心的环境中在一系列常见的地形(步骤,坡道,间隙和楼梯)上实现感知运动。我们制定了适合在感兴趣地形上运动的稀疏视觉输入的选择,并提出了一个学习框架,以整合外部感受和本体感受状态。我们专门设计了状态观察和培训课程,以在各种不同的地形上有效地学习反馈控制政策。我们在各种任务中广泛验证和基准了学到的政策:在地面上行走的全向行走,并在各种障碍物上向前移动,显示出高成功的遍历率。此外,我们通过在新的看不见的地形上增加各种水平的噪声和测试来研究外观感受性消融并评估政策概括。我们证明了自主感知运动的能力,只能使用直接深度测量中的稀疏视觉观测来实现,这些观察值易于从激光雷达或RGB-D传感器中易于获得,在20厘米高度的高高高度上显示出强大的上升和下降,即20 cm的高度,即50%的腿长和强劲的腿部和稳健的噪声和Unigeseen anderseenseles anderseens anderseens anderseen anderseenseles anderseen anderseen sereen seleseen anderains ternales anderains。
使用稀疏的视觉观察在不平坦的地形上学习感知运动
主要关键词




相关文件推荐