机构名称:
¥ 1.0
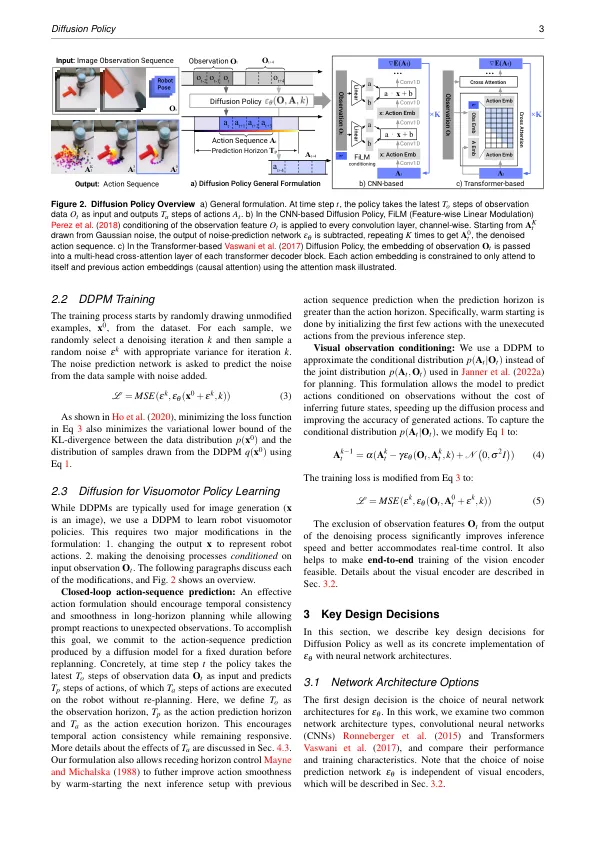
摘要本文介绍了扩散策略,这是一种通过将机器人的视觉运动策略表示为有条件的降级扩散过程来生成机器人行为的新方法。我们从4种不同的机器人操纵基准的15个不同任务进行基准扩散策略,发现它始终优于现有的最新机器人学习方法,平均提高46.9%。扩散策略学习了动作分布得分函数的梯度,并通过一系列随机Langevin动力学步骤在推断过程中对此梯度字段进行了迭代优化。我们发现,用于机器人策略的扩散配方会产生强大的优势,包括优雅地处理多模式作用分布,适合高维操作空间以及表现出令人印象深刻的训练稳定性。为了充分解锁在物理机器人上进行视觉运动策略学习的扩散模型的潜力,本文提供了一组关键的技术贡献,包括结合后退的地平线控制,视觉调节和时间序列扩散变压器。我们希望这项工作将有助于激励新一代的政策学习技术,这些技术能够利用扩散模型的强大生成建模能力。代码,数据和培训详细信息可用forfusion-policy.cs.columbia.edu
通过行动扩散的视觉运动策略学习
主要关键词


相关文件推荐