XiaoMi-AI文件搜索系统
World File Search System细长
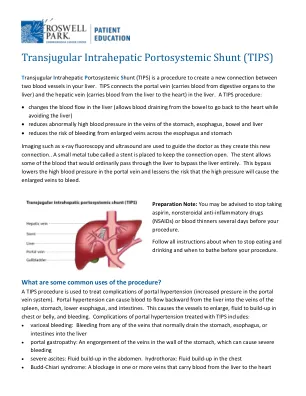
经颈静脉肝内门体分流术 (TIPS)
观看并指导程序。X 光机和悬挂在检查台上方的探测器会生成视频。超声波机器使用高频声波来创建身体图像。机器有一个计算机控制台、一个视频监视器和一个换能器。换能器是一种类似于麦克风的小型手持设备。当换能器压在皮肤上时,它会将高频声波的小脉冲引导到体内。声波从体内的组织反弹(回声)。换能器捕获反弹的波并将其发送到计算机以创建图像(显示在监视器上)。超声波技术用于潜艇,蝙蝠产生并使用自己的超声波来导航和寻找猎物。一些检查可能在一次检查中使用不同类型的换能器。• 支架:一种金属机械管,通常用 GORE-TEX 织物覆盖• 带球囊的导管:一种细长(直径约 1/8 英寸)的塑料管,顶部有一个可充气的球囊

剖析成年神经干细胞的时空多样性突触囊泡的分子结构-MDC存储库
在这项研究中,Kravčenko及其同事提高了我们对突触囊泡(SVS)(SVS)的理解,这对于神经递质的存储和释放至关重要。采用冷冻电子断层扫描,该研究表征了SV蛋白的多样性,其中包括SV表面上的小蛋白,内部的细长蛋白,以及随机分布在SVS表面的大V -ATP酶。v - ATPase结构显示出另一种跨膜相互作用伴侣突触素。这项研究在网格蛋白涂层的网状蛋白笼中发现了v- ATPases,并在囊泡上部分组装了网状蛋白涂层,并在神经元内和神经元内部,提供了对其结构对称性的见解。此外,该研究确定了细胞膜附近没有囊泡的网状蛋白篮。这些发现突出了SV的复杂分子结构,提供了广泛的透视图并补充了传统的蛋白质组学分析和荧光显微镜。

双刚度刚度梁的静态屈曲与自由振动分析...
本研究提出了二维功能梯度 (2D-FG) 金属陶瓷多孔梁静态屈曲和自由振动分析的解析解。为了实现这一目标,利用汉密尔顿原理推导出梁的运动方程,然后在 Galerkin 著名的方程解解析法框架内求解导出的方程。梁的材料属性随厚度和长度的变化而变化,符合幂律函数。在功能梯度材料 (FGM) 的制造过程中,可能会由于技术问题导致微孔出现而出现孔隙。本文给出了详细的数学推导并进行了数值研究,重点研究了各种参数(例如厚度和长度两个方向上的 FG 功率指数、孔隙率和细长比 (L/h))对基于新高变形梁理论的梁的无量纲频率和静态屈曲的影响。通过将结果与公认的研究进行比较,验证了所提出模型的准确性。根据屈曲和振动分析的结果,所提出的沿厚度方向的修改的横向剪应力与TBT相比表现出更接近的结果。

变刚度索驱动机械手阻抗控制的卷积动态跳跃规划算法
摘要:缆索驱动机械手具有手臂细长、运动灵活、刚度可控等特点,在捕获在轨卫星方面有着很大的应用前景,但由于缆索长度、关节角度和反作用力之间的耦合关系,难以实现缆索驱动机械手的有效运动规划和刚度控制。该算法还可以通过动态设置加加速度使加速度更加平滑,减小加速度冲击,保证缆驱动机械手的稳定运动。再次,通过采用基于位置的阻抗控制来补偿驱动缆的位置和速度,进一步优化缆驱动机械手的刚度。最后,开发并测试了变刚度缆驱动机械手样机,利用卷积动态加加速度规划算法规划出所需的速度曲线,进行了缆驱动机械手的速度控制实验,结果验证了该算法可以提高加速度的平滑度,从而使运动更加平滑,减小振动。此外,刚度控制实验验证了缆驱动机械手具有理想的变刚度能力。
sanjay Kumar博士在鱼类中的声学 - 属性系统
来自神经局器官的神经瘤细胞。神经瘤器官是侧线系统的受体成分。每个神经膜器官都包含两种类型的细胞。受体细胞是梨形的,聚集在中间形成簇,而支撑细胞则长而细长,并围绕受体排列以形成神经瘤器官的周围。每个感觉细胞在顶端都带有类似感觉过程的头发。头发包含许多(约20-25)小立体胶质和一个边缘的大型运动圆膜,这些凝乳块将被神经瘤细胞分泌并突出到水中。其余的毛细胞在朝向运动过程上方向两极化。由水在水中运动引起的任何碎杯的任何位移都会转化为去极化并诱导受体潜力。受体毛细胞的基础末端继续进入VII,IX和XTH颅神经的轴突纤维。

SS316L 定向能量沉积熔池中流体流动和传热的数值模拟
摘要。本文介绍了为模拟不锈钢 SS316L 定向能量沉积中形成的熔池中的流体流动和传热而开发的数值模型。该模型结合了重要的热量和动量源项。能量源项包括激光能量、相变潜热、对流热损失、辐射热损失、蒸发热损失以及由于熔融颗粒沉积到熔池中而增加的能量。动量源项是由表面张力效应、热毛细(Marangoni)效应、热浮力、相变引起的动量衰减、熔融颗粒动量以及由于蒸发引起的反冲效应引起的。模拟表明,熔池中预测的流动和传热会影响最终的形状和尺寸。在当前采用的工艺参数下,熔池细长、宽而浅,具有凹陷的自由表面和向外的对流。向外流动是由熔池中心的高温主导区域引起的,因此表面张力的温度梯度为负。

引文 M Ranjkesh、M Kazem Tarzmani、D Pashaei,尾状沟位置的频率
背景:透明隔尾状沟 (CSP) 是一种重要的解剖结构,在胎儿大脑发育中发挥作用。本研究旨在评估孕妇 CSP 的位置、几何特性和面积,以及它与中线的关系。方法:对 106 名孕妇进行了横断面研究。评估了 CSP 相对于中线的位置,并使用超声成像测量了其长宽比、面积和形状。进行了统计分析以检查这些特征与年龄、BMI 和孕龄等母亲特征之间的关系。结果:大多数 CSP 位于中线或中线附近 (67.9%)。CSP 的长宽比主要大于 1.5,表明呈细长形状。CSP 面积范围为 6 至 10 平方毫米,观察到一些较大的值。 CSP特征与母体因素无明显相关性。结论:孕妇CSP的位置、几何形状和面积均呈正常变化,大多数测量值均在预期发育范围内。这些发现为胎儿大脑发育评估提供了有用的参考,并可能有助于识别妊娠期间异常的大脑结构。

柔性航天运载火箭的建模、仿真和控制
摘要 — 现代太空运载火箭 (SLV) 外形细长,由于使用了轻质材料,通常具有柔性。这种结构柔性与传感器和执行器动力学相结合,会对 SLV 的控制产生不利影响,从而导致运载火箭不稳定,在最坏的情况下,还会导致结构故障。这项工作侧重于 SLV 的刚性和柔性动力学的建模和仿真及其与控制系统的相互作用。SpaceX 的 Falcon 9 被选为本研究的对象。使用 Ansys 中的模态分析计算柔性模式。开发了高精度非线性模拟,将柔性模式及其与刚性自由度的相互作用结合起来。此外,还开发了柔性体动力学的线性化模型,涵盖整个轨迹直到第一级分离。使用经典控制方法,开发了使 SLV 保持其期望轨迹的姿态控制器,并设计了多个滤波器来抑制柔性动力学的相互作用。设计的控制器以及滤波器在非线性模拟中实现。此外,为了证明设计的控制器的鲁棒性,进行了蒙特卡罗模拟并给出了结果。关键词 — 航天运载火箭;柔性动力学;柔性模式;增益稳定;陷波滤波器;低通滤波器;椭圆滤波器
小环藻蛋白酶基因基因(MCY基因)的分子检测和半定量免疫学检测微囊蛋白毒素在体外生长的蓝细菌
实验室质量培养物。minimus,A。fortilissima,P。uncinatum和S.细长。通过监测浊度,叶绿素浓度和蛋白质含量来评估这些培养物的生长。经过18天的接种期,观察到纯培养物的最大生长。使用离心浓缩的发育良好的培养物并随后冻干以将其保存为粉状形式。DNA提取在冻干的培养物上进行,从而在井下导致透明的DNA带。由A260/280比率确定的提取的DNA的质量范围为1.6至1.8。Mcyabde基因在铜绿节和O. Laetevirens var中成功扩增。minimus,而A. fortilissima和P. uncinatum分别显示了McYabd和McYabe基因的扩增。在弹性链球菌中未观察到放大。使用半定量ELISA技术,仅在微囊孢子虫中检测到显着浓度的微囊藻蛋白,水平为0.5 ppb,而其他培养物的痕量量低于0.5 ppb。

在不确定的环境接触和力量中,软机器人的精确控制
摘要 - 重新研究已经报道了生物启发的软机器人的显着性,以表现出灵敏和接触式的友好型。在这项工作中,我们采取了第一个步骤,通过提出一个全面的建模和控制框架来解决细长气动软机器人的问题。我们的框架采用了一个完全参数化的模型,该模型可以准确地描述了使用Hermite插值的机器人配置和分布力。利用此模型,我们进一步建立了一种估计算法,该算法可以推断出有限的运动数据中的完整机器人配置并分布外力,从而使接触位置和力量感知。整合了该模型和估计器,我们的控制框架 - 工作在不同的力下实现了精确的机器人运动控制,平均轨迹跟踪误差在0.3 mm之内。它还检测到并适应不确定的接触,在自动避免障碍物和精确抓握的测试中证明了这一点。此框架对各种应用程序(例如环境探索和安全操纵)有望在需要与环境的互动中进行安全操作。