机构名称:
¥ 1.0
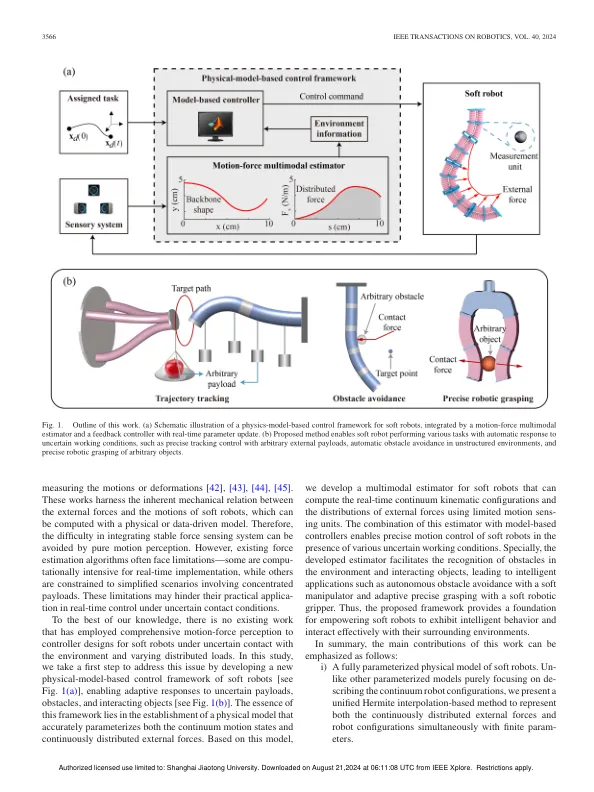
摘要 - 重新研究已经报道了生物启发的软机器人的显着性,以表现出灵敏和接触式的友好型。在这项工作中,我们采取了第一个步骤,通过提出一个全面的建模和控制框架来解决细长气动软机器人的问题。我们的框架采用了一个完全参数化的模型,该模型可以准确地描述了使用Hermite插值的机器人配置和分布力。利用此模型,我们进一步建立了一种估计算法,该算法可以推断出有限的运动数据中的完整机器人配置并分布外力,从而使接触位置和力量感知。整合了该模型和估计器,我们的控制框架 - 工作在不同的力下实现了精确的机器人运动控制,平均轨迹跟踪误差在0.3 mm之内。它还检测到并适应不确定的接触,在自动避免障碍物和精确抓握的测试中证明了这一点。此框架对各种应用程序(例如环境探索和安全操纵)有望在需要与环境的互动中进行安全操作。
在不确定的环境接触和力量中,软机器人的精确控制
主要关键词


相关文件推荐