XiaoMi-AI文件搜索系统
World File Search System群体
化学群体理论-II。晶体固体中的对称性
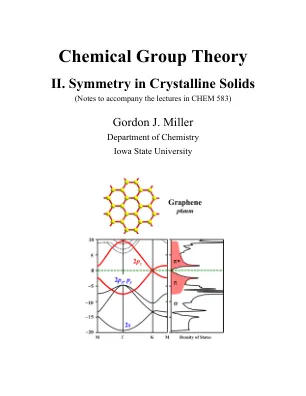
(1)晶体结构:识别分子和固体的结构对称性对于了解其物理和某些化学特性的性质很重要。分子对称性由一个点组总结,为此,所有对称元素(点,轴,平面)在一个固定点上相交,该固定点被分配为空间坐标系的起源。例如,考虑使用点组𝒟6h。起源在没有原子的分子中心。其一些对称元素包括六倍旋转轴和六个垂直镜面;相应的操作是由2π/6(60°)的倍数旋转和反射。晶体固体在空间中的多个点显示旋转对称性,因为这些结构也表现出转化周期性,这是由晶格描述的。旋转和翻译对称操作的组合产生了一个空间群。考虑石墨烯的结构,该结构由融合的六元环的平面网络组成。如果忽略了平面中结构的终止,则每个六角形的中心都有六倍的旋转轴,并且每个碳原子都与三倍的旋转轴相交。翻译周期性由连接每个六角形中心的单位单元(平行四边形)表示。作为另一个例子,Cenic 2的结构包含[NIC 2]的平面与[NIC 2]平面的七元环上方和以下的CE原子平面交替。在沿堆叠方向的该结构的投影中,单位单元格是一个矩形,垂直镜面显而易见。此外,这种晶体结构还有另一种类型的对称性操作,对于任何分子:滑动反射而不会发生,其中通过镜面的反射是平行于(沿着(沿着)反射平面的(“滑行”)的位移。自身反射或自身位移都不是对称操作,但是两个操作的组合是用于Cenic 2结构。

利用群体能力来协助其他系统
大多数群体机器人学的研究都将群体视为一种孤立的感兴趣系统。对异质群的研究[1],[2]检查了各种类型的机器人,但这些机器人也被视为一个单一实体。尽管在某些情况下,外部系统支持群体[3],但群体为另一个系统提供服务仍然很少。我们认为,群体作为自我足够的独立系统的普遍观点限制了群体机器人技术的潜在应用范围。具体来说,某些方案 - 诸如搜索和救援操作之类的iOS可能不会从部署机器人群作为自主解决方案来获得可观的优势。但是,群体提供的援助对人类救援人员来说是无价的。机器人群是独特的,以有效地采集。他们的分布式性质使他们能够快速收集环境数据,并通过点对点共享不断地向这些信息持续。我们将这种集体数据收集能力称为“群体的群体”。在群体机器人技术中,已经对集体行为进行了广泛的研究[4],[5]和集体决策[6],[7],通常强调了群体感知的重要性。例如,Valentini等人的作品。[8]和Zakir等。[9],使用群体感知作为评估集体决策的研究中的工具。群体感知使群可以动态地进行周围环境,检测和报告变化,即使在结构最初未知的环境中也是如此。通常在内部使用收集的信息来完善群体的集体行为,但它也可以看作是一个庞大的,不断发展的共享数据库,其中包含特定于任务的环境数据。通过授予外部系统访问此数据库(例如,通过群体机器人和外部机器人之间的通信)群可以提供有助于外部系统任务的关键信息。但是,有明显的研究重点是利用群体感知来使外部系统受益。群体支持的潜在受益者扩展了 -

群体智能 (SI) 是一种基于分散、自组织系统的集体学习和决策形式。利用 SI 医疗保健
群体智能 (SI) 是一种基于分散、自组织系统的集体学习和决策形式。利用 SI 医疗保健可以解决互联医疗保健组织内部攻击的传播问题,并确保基于安全性和弹性的医疗保健生态系统的完整性。在医疗保健领域,群体智能正被用于改善诊断和治疗,从而改善患者的治疗效果和提高医疗保健系统的效率。SI 算法可以集成到医疗保健环境中,用于诊断和治疗癌症、心脏病、肿瘤和心脏病等疾病,它已应用于疾病诊断和治疗领域。它已被用于早期预测癌症并解决复杂问题。此外,它可以快速了解癌细胞如何对抗癌药物产生耐药性,这有助于改善药物开发并调整药物使用。通常,SI 算法用于 PSO、ICA、FA 和 IWO 中,用于诊断癌症以解决问题的优化。这反过来会提高 SI 在数据分析中的整体有效性。然而,将群体智能应用于癌症相关问题存在一些挑战。其中一些挑战包括癌症的复杂性、癌症分析、验证和临床转化、抵抗力和适应性等。必须通过改进算法和模型来克服这些挑战,使它们更高效、可扩展,更适合处理大规模和高维癌症数据集。或者,SI 在癌症检测中的主要应用是图像分析和模式识别,这有助于识别与癌组织相关的模式和特征,有助于早期检测和准确诊断。在癌症研究的 SI 领域,预计未来将取得多项进展。在癌症研究与多组学数据的整合、用于靶向药物输送的群体机器人等领域,SI 的一些潜在未来进展正在开发中。在这期题为“用于早期癌症检测的医疗数据分析中的群体智能”的特刊中,旨在探索使用群体智能技术的各个方面,包括适应性、维度、检测和预防、决策、未来发展和医疗数据的其他领域。感兴趣的主题包括但不限于以下内容:

基金群体和定义 - 财务与会计
109 E&G-一般收入 - 该基金的专业和研究生学位卓越计划资金由佛罗里达州立法机关为专业和研究生学位卓越计划提供。该基金用于预算和跟踪此计划的支出。支出必须遵守佛罗里达州设定的所有限制。111个教育增强信托基金 - 该基金中的Main Carkus Monies来自佛罗里达州获得UF Main Campus的彩票销售收入。这些资源由预算办公室管理,用于主校园运营费用。支出必须遵守佛罗里达州设定的所有限制。该基金中的112个教育增强信托基金HSC款项来自佛罗里达州的UF健康科学中心(HSC)获得的彩票销售收入。这些资源由预算办公室管理,用于HSC运营费用。支出必须遵守佛罗里达州设定的所有限制。该基金中的113个教育增强信托基金基金款来自佛罗里达州食品和农业科学研究所(IFAS)的彩票销售收入。这些资源由预算办公室管理,用于IFAS运营支出。支出必须遵守佛罗里达州设定的所有限制。121学生费用 - 主要校园基金


印度——宗教少数群体、表列种姓和部落
3.2.3 基督徒是受模糊定义的“强制”皈依州法律影响最大的宗教少数群体,这些法律赋予政府特工广泛的逮捕权。根据这些法律被捕的人,包括传教士,可能会受到罚款以及其他处罚,例如最高 3 年的监禁。据《天主教亚洲新闻》(UCA News)报道,2023 年 9 月,一周内有 25 多名基督徒(包括牧师)因涉嫌皈依活动而被拘留或逮捕,此前六个月内有 100 多人(包括牧师)被拘留或逮捕。目前没有关于皈依案件起诉、定罪或判刑细节的数据,但有报告表明,一些州高等法院驳回了根据强制皈依法提起的案件(见皈依和“强制”皈依)。

MCHIAO:基于解决工程问题的混乱行为的修改后的冠状病毒群体 - Aquila优化算法
摘要本文提出了一种混合修饰的冠状病毒群免疫Aquila优化算法(MCHIAO),该算法(MCHIAO)编译了增强的冠状病毒群免疫优化器(ECHIO)算法和Aquila Optimizer(AO)。作为具有竞争性人类的优化算法之一,冠状病毒群免疫优化器(CHIO)超过了其他一些以生物为灵感的算法。与其他优化算法相比,CHIO显示出良好的结果。然而,CHIO与局部Optima相关,并且大规模全球优化问题的准确性降低了。另一方面,尽管AO具有显着的本地剥削能力,但其全球勘探能力却没有必要。随后,提出了一种新型的元疗优化器,修饰的冠状病毒群kepira优化器(MCHIAO),以克服这些限制并将其适应以解决特征选择挑战。在本文中,提出了三个主要的增强功能,以克服这些问题并达到更高的最佳结果,这些结果是分类的情况,使用混乱系统增强了新基因的价值方程,并受到了冠状病毒的混乱行为的启发,并产生了一种新的公式,以开关开关和狭窄的利用。MCHIAO证明,除了AO和CHIO之外,还值得十种众所周知的最著名的最先进的优化算法(GoA,MFO,MPA,GWO,GWO,HHO,HHO,HHO,HHO,WOA,IAO,NOA,NOA,NOA,NGO)。Friedman平均水平和Wilcoxon统计分析(P值)均在所有最新算法测试23个基准功能上进行。Wilcoxon测试和Friedman在29 CEC2017功能上也进行了。此外,在10 CEC2019基准功能上进行了一些统计检验。六个现实世界中的问题用于验证所提出的MCHIAO针对相同的十二个最先进的算法。在经典函数上,包括24个单峰和44个多模式函数,分别评估了混合算法MCHIAO的剥削性和探索性行为。使用Wilcoxon Rank -sum检验计算的P值证明了所提出的所有功能的统计学意义,因为发现这些P值小于0.05。

使用限制光谱成像检测临床意义前列腺癌的定量测量效用 开发人工智能生成的,可解释的处理1 在精神病等候补名单上实施移动AI聊天机器人干预抑郁症的挑战:随机控制学习终止报告 心力衰竭患者的院内死亡率的预测 使用分阶段seq技术对循环肿瘤DNA分析进行分析验证,以检测B细胞恶性肿瘤中的残留疾病 抗治疗癌细胞的计算分析 评估血浆P-TAU217用于检测多样化和异质社区同类群体中淀粉样病理学的评估 在甲状腺结节分类中增强诊断精度:一种自动化超声图像分析的深度学习方法 使用飞行时间MRI 测量脑血管系统中的动脉曲折。 初始结果
Mariluz Rojo Domingo * 1,2,Christopher C Conlin,PhD * 3,Roshan A Karunamuni,PhD 2,Courtney Ollison,Courtney Ollison,BS 2,Madison t Baxter,MS 2,MS 2,Karoline Kallis,Karoline Kallis,Karoline Kallis,Phd 2,Deondre d do,do do do,bs 1,2 Shabaik,医学博士5,Michael E Hahn,医学博士,博士3,Paul M Murphy,医学博士,博士3,Rebecca Rakow-Penner,MD,PhD 3,Anders M Dale,Anders M Dale,Phd 3,6,7,Tyler M Seibert,MD,MD,博士学位1,2,3 *这些作者在1,2,3 *

丹麦卫生局针对 2024/25 流感疫苗接种计划采购目标群体和疫苗类型的初步建议
过去两个季节,丹麦国家卫生委员会根据疫苗接种委员会的建议,继续临时为 2 至 6 岁的儿童提供该计划。 2021/22 赛季,儿童参与率为 29%,2022/23 赛季为 22%。在刚刚结束的这一季中,儿童们的支持率最终为 16%。配合今年的疫苗接种活动,丹麦卫生局对2至6岁儿童的父母进行了一项调查。除此之外,它还表明,父母对流感感染的担忧有所降低,他们不像以前那样愿意让自己的孩子接种疫苗来保护他人,而这正是这项提议的目的之一。此外,这表明许多孩子未接种流感疫苗的家长对这一优惠本身并不特别反感。选择退出更多是实际情况的结果,例如可访问性与低风险认知的结合。
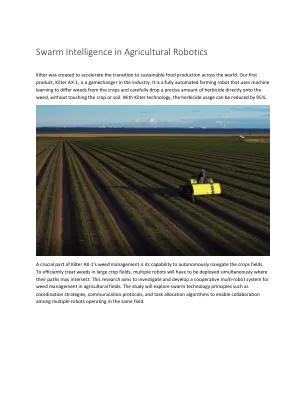
农业机器人技术中的群体智能
Kilter AX-1的杂草管理的关键部分是其自主浏览农作物场的能力。要在大型农田中有效治疗杂草,必须同时部署多个机器人的路径可能相交。这项研究旨在调查和开发一种在农业领域的杂草管理的合作多机器人系统。该研究将探讨群体技术原则,例如协调策略,沟通协议和任务分配算法,以实现在同一领域运行的多个机器人之间的协作。