XiaoMi-AI文件搜索系统
World File Search System腕关节

一种使用 EEG 的低成本便携式腕外骨骼...
偏瘫是脑卒中患者的常见后遗症( Wist et al., 2016 ),导致一侧肢体瘫痪,包括运动功能障碍和肢体肌肉无力( Maria and Eng, 2003 ; Li et al., 2013 )。由患者自愿发起的主动治疗比持续被动运动(CPM) ( Takahashi et al., 2008 ) 更有利于神经元恢复,同时,重复、持续的训练可以促进脑卒中患者的功能恢复( Kwakkel et al., 2004 ; Wang et al., 2013 )。由于腕关节对于日常生活活动(activities of daily living, ADLs)至关重要,许多康复系统被提出来辅助腕关节的主动训练( Krebs 等,2007 ;Song 等,2013 ;Abdallah 等,2016 ;Lin 等,2020 )。然而,在偏瘫康复方面,这些系统存在两个不足。首先,这些康复机器人是由偏瘫手臂控制的,这对于急性偏瘫患者来说并不适用,因为他们受损侧的运动功能已经丧失。其次,上述方法忽略了训练过程中肌肉疲劳的发生,存在影响患者主动参与的风险。
覆盖政策/指南
2. 对于 2 岁及以上的会员,若满足以下任一条件,可授予 12 个月的授权用于治疗中度至重度活动性关节型幼年特发性关节炎:i. 会员对以足够剂量和疗程给予的甲氨蝶呤或其他常规合成药物(例如来氟米特、柳氮磺吡啶、羟氯喹)反应不足。ii. 会员对计划内的非甾体抗炎药 (NSAID) 和/或关节内糖皮质激素(例如曲安奈德)试验反应不足,并且存在以下不良预后风险因素之一:a. 涉及踝关节、腕关节、髋关节、骶髂关节和/或颞下颌关节 (TMJ) b. 存在糜烂性疾病或肌腱炎 c. 诊断延迟 d. 炎症标志物水平升高 e. 对称性疾病 iii.会员具有导致疾病严重程度的风险因素,并且可能存在更难治愈的疾病过程(参见附录 B),并且会员还符合以下条件之一:a. 涉及高风险关节(例如颈椎、腕关节或髋关节)。b. 疾病活动度高。c. 被判定为罹患致残性关节疾病的风险较高。
VA/DOD 上消化道疾病管理临床实践指南
有各种分类法来描述不同级别的 ULA。(2) 表 1 将国际标准截肢术语与临床和研究出版物中用于描述截肢水平的常用术语进行了关联。VA 和 DoD 建议使用国际标准术语来描述 ULA。此外,ULA 可分为大截肢或小截肢。如表 1 所示,该分类法将腕关节离断水平及更近端的截肢归类为大截肢,将涉及手或手指的截肢归类为小截肢。虽然这种分类法在临床和研究环境中都得到了广泛使用,但 VA 和 DoD 并不明确支持使用这种术语,因为被归类为

第二部分:问题及答案
一名既往健康的 68 岁男性出现右手进行性肌肉无力、吞咽困难和行走困难。他认为这些症状是“突然”发生的,并且在过去 2-3 个月内恶化。他的体温为 98.6 华氏度(37 摄氏度),血压为 145/86 毫米汞柱,脉搏为 80/分钟,呼吸为 17/分钟。神经系统检查发现有轻度构音障碍。他的右手和前臂鱼际肌萎缩,腕关节伸展和屈曲肌力为 2/5,右手内在肌力为 3/5。他的右大腿有一些肌束震颤,双侧髋屈肌轻度(4+/5)无力。双腿张力增加。感觉检查完好。左下肢髌骨反射为 3+。步态测试显示,患者平衡能力较差,步态痉挛。以下哪项是最可能的诊断?

LORIS:用于极端地形探索的轻型自由攀爬机器人
摘要 — 攀爬机器人可以调查传统探测车由于地形陡峭而无法到达的具有科学价值的地点。配备微棘爪的机器人特别适合攀爬岩石峭壁,但大多数现有设计要么体积大、速度慢,要么仅限于相对平坦的表面(如墙壁)。我们提出了一种新型自由攀爬机器人,通过创新爪设计和力控制来弥补这一差距。完全被动的爪和腕关节可实现安全抓握,同时减轻质量和复杂性。使用基于优化的控制策略在机器人的爪之间分配力,以最大限度地降低意外脱落的风险。机器人原型已经展示了在地球重力环境下在平坦的煤渣砌块墙壁和不平坦的岩石表面上的垂直攀爬。
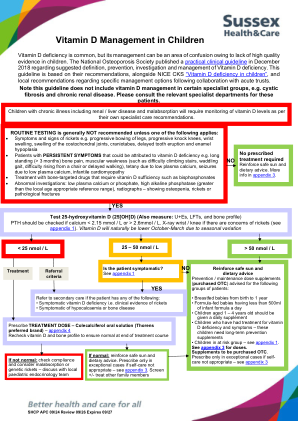
儿童维生素 D 管理 - NHS Sussex
一般不建议进行常规检测,除非出现以下情况之一:• 佝偻病的症状和体征,如进行性罗圈腿、进行性膝外翻、腕关节肿胀、肋软骨关节肿胀、颅骨软化、牙齿萌出延迟和牙釉质发育不全• 患者持续出现可归因于维生素 D 缺乏的症状,如长期(> 3 个月)骨痛、肌肉无力(如爬楼梯困难、蹒跚步态、从椅子上站起困难或行走延迟)、低血浆钙导致的手足搐溺症、低血浆钙导致的癫痫、婴儿心肌病• 使用需要维生素 D 充足的骨靶向药物(如双磷酸盐)治疗• 检查异常:低血浆钙或磷酸盐、高碱性磷酸酶(大于当地年龄适当参考范围)、X 光片 - 显示骨质减少、佝偻病或病理性骨折
标准操作程序和临床路径神经病学...
耳石复位疗法 ................................................................................................................ 86 定量脑电图 (QEEG) ...................................................................................................... 88 神经反馈 .............................................................................................................................. 91 音频脑波训练 (ABWE) ...................................................................................................... 94 视觉治疗 ...................................................................................................................... 97 超声波治疗 ...................................................................................................................... 99 虚拟现实神经修复 ...................................................................................................... 101 脑机接口认知刺激 (BCI-CS) ...................................................................................... 104 脑动态思维调节 / 催眠治疗 ............................................................................................. 107 脑电波治疗 ............................................................................................................. 110 神经肌肉贴 (NMT) ............................................................................................................. 115 腕关节神经肌肉贴 (NMT) ............................................................................................. 118 腕关节神经肌肉贴 (NMT)隧道综合症 ................................................................ 122 神经肌肉贴扎 (NMT) 垫坐骨神经痛 .................................................................. 126 神经肌肉贴扎 (NMT) 垫 足底筋膜炎 .................................................................. 129 神经肌肉贴扎 (NMT) 垫 膝关节病 .................................................................. 132 经颅直流电刺激 (tDCS)/经颅交流电刺激(tACS) / 经颅随机噪声刺激 (tRNS) ................................................... 135 重复经颅磁刺激 (rTMS) ................................................................................... 138 干针治疗 .................................................................................................................... 141 干细胞 / Sel Punca ........................................................................................................ 143 Terapi Restoratif Botoks terhadap Spastisitas .................................................................................. 146 Injeksi Toksin 肉毒杆菌 Untuk Distonia Fokal ................................................................................ 148 Bedah Stimulasi Otak Dalam(深部脑刺激).................................................................. 153 Kecepatan Hantar Saraf (KHS) .................................................................................. 157 Pemeriksaan F 波 .......................................................................................................... 172 肌电图 (EMG) ............................................................................................................. 175 瞬目反射 ( 眨眼反射 ) ................................................................................................ 178 重复神经刺激 (RNS) ............................................................................................................. 180 单纤维肌电图 ............................................................................................................................. 182 皮肤交感神经反应 (SSR) ............................................................................................................. 183 心率变异性 (RR 间隔 ) ............................................................................................................. 186 体感诱发电位 (SSEP) ............................................................................................................. 189 运动诱发电位 (MEP) ............................................................................................................. 191 视觉诱发电位 (VEP) ............................................................................................................. 195 脑干听觉诱发电位 (BAEP) ............................................................................................................. 197 P300 ............................................................................................................................. 199术中神经生理监测 (IONM) ...................................................................................... 202 多重睡眠图 (PSG) .............................................................................................................. 213 多次睡眠潜伏期测试 (MSLT) .............................................................................................. 216................................ 197 P300 ................................................................................................................................ 199 术中神经生理监测 (IONM) ...................................................................................... 202 多重睡眠图 (PSG) ................................................................................................................ 213 多次睡眠潜伏期测试 (MSLT) ................................................................................................ 216................................ 197 P300 ................................................................................................................................ 199 术中神经生理监测 (IONM) ...................................................................................... 202 多重睡眠图 (PSG) ................................................................................................................ 213 多次睡眠潜伏期测试 (MSLT) ................................................................................................ 216

附录
我们现在概述了示波器状态的一些关键特性(如图6) - (1)首先,预抓机器人将机器人靠近目标对象,并将机器人的手掌和腕关节朝向物体。此接近度可确保前Grasps可以轻松地演变成稳定的掌握,而无需机器人探索整个状态空间。(2)此外,pre-prasp figer提出了有关对象功能部分的有价值信息,而无需机器人明确推理它。例如,将机器人的纤维夹在杯子手柄周围的固定器,为机器人抓住手柄提供了至关重要的信号,可以使机器人与杯子相互作用。此属性还意味着每个对象可能会有多个预段(对应于不同的功能)。(3)最后,预抓态激励有利的联系(例如与工具手柄的互动)并避免与物体的危险接触(例如刀边缘)和/或场景的任何其他部分(例如按到表中)。这是至关重要的,因为灵活的操作充满了触点,这些接触很难有效地建模,预测和理性。良好的预抓手为学习下游操纵行为提供了有利的开始和强大的动力。
Orencia 皮下注射事先授权政策
多关节炎。3 对于具有风险因素和高风险关节(例如颈椎、腕关节或髋关节)、高疾病活动度和/或被判定为具有致残性关节损伤高风险的患者,可考虑使用生物制剂进行初始治疗。对于尽管使用非甾体抗炎药但仍患有活动性骶髂关节炎或肌腱炎的患者,建议使用肿瘤坏死因子抑制剂 (TNFi)。• 银屑病关节炎:ACR (2018) 指南建议,对于未经治疗的银屑病关节炎患者和之前接受过口服治疗的患者,TNFi 优于其他生物制剂。4 但是,对于复发性或严重感染的患者,可能考虑使用 Orencia 优于其他生物制剂。政策声明 建议事先授权 Orencia 皮下注射的处方福利覆盖范围。所有批准均在以下持续时间内提供。如果批准以月为单位授权,则 1 个月等于 30 天。由于对接受 Orencia 治疗的患者进行评估和诊断以及对不良事件和长期疗效进行监测需要专业技能,因此初步批准要求 Orencia 皮下注射剂必须由专门治疗该病症的医生开具处方或与其协商。

对腕部康复机器人和新设备所需的亮点的评论
摘要:各种疾病,包括交通事故,运动损伤和神经系统疾病,可能会损害人的手腕运动,强调有效康复方法的重要性。机器人设备在这方面起着至关重要的作用,尤其是在腕部康复中,鉴于人手腕关节的综合性,它包括三个自由度:屈曲/延伸,旋转/superation/prention/supination/prentation/supination/portination/supination/supination/pradial/radial/ulnar偏差。本文对手腕康复设备进行了全面的综述,采用了一种基于从2007年开始的关键字“手腕康复机器人”来源的基于PubMed,ScienceDirect,Scopus和IEEE的主要文章的方法学方法。这些发现突出了各种各样的手腕康复设备,以表格格式进行系统组织,以增强理解。作为研究人员的宝贵资源,本文可以对各种属性的机器人手腕康复设备进行比较分析,从而对未来的进步提供了见解。特别值得注意的是,将严肃的游戏与简化的手腕康复设备整合在一起,这标志着一种有希望增强康复结果的途径。这些见解为开发新的机器人手腕康复设备的开发奠定了基础,或者改善了现有的原型,并结合了一种前瞻性方法来改善康复结果。