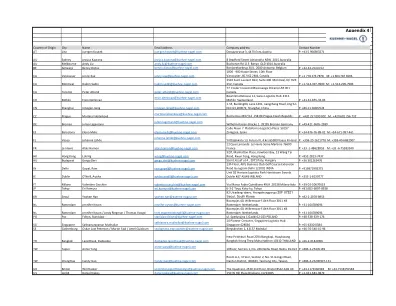
机构名称:
¥ 1.0
我们现在概述了示波器状态的一些关键特性(如图6) - (1)首先,预抓机器人将机器人靠近目标对象,并将机器人的手掌和腕关节朝向物体。此接近度可确保前Grasps可以轻松地演变成稳定的掌握,而无需机器人探索整个状态空间。(2)此外,pre-prasp figer提出了有关对象功能部分的有价值信息,而无需机器人明确推理它。例如,将机器人的纤维夹在杯子手柄周围的固定器,为机器人抓住手柄提供了至关重要的信号,可以使机器人与杯子相互作用。此属性还意味着每个对象可能会有多个预段(对应于不同的功能)。(3)最后,预抓态激励有利的联系(例如与工具手柄的互动)并避免与物体的危险接触(例如刀边缘)和/或场景的任何其他部分(例如按到表中)。这是至关重要的,因为灵活的操作充满了触点,这些接触很难有效地建模,预测和理性。良好的预抓手为学习下游操纵行为提供了有利的开始和强大的动力。
附录
主要关键词


相关文件推荐