XiaoMi-AI文件搜索系统
World File Search System自行车道

CAESAR 自行榴弹炮(装有火炮系统的卡车)
155 毫米/52 口径榴弹炮 每队乘员:5 人 射速,6 发/分钟 行动/射击时间 6 发/停止行动:2 分钟 6x6 底盘,可选配附加保护套件 ATLAS:自动地对地炮火射击和联络

感知有助于计划:促进多阶段车道 -
摘要 - 在计划自动驾驶时,要考虑基本的交通元素,例如车道,相互作用,交通法规和动态代理,这一点至关重要。但是,他们经常被传统的端到端计划方法所忽视,这可能导致效率低下和不遵守交通法规。在这项工作中,我们努力将这些元素的感知整合到计划任务中。为此,我们提出了感知有助于计划(PHP),这是一个新颖的框架,可将车道级别的计划与知觉调和。此集成确保计划本质上与流量限制一致,从而促进安全有效的驾驶。具体来说,PHP考虑了两条车道边缘在Bird's Eye View(BEV)中的位置,以及与车道交叉路口,车道方向和车道占用相关的属性。在算法设计中,该过程始于编码多相机图像的变压器以提取上述特征并预测车道级别的感知结果。接下来,分层功能早期融合模块完善了预测计划属性的功能。最后,一个特定的解释器利用了一个晚期融合过程,旨在整合车道级别的感知和计划信息,最终导致生成车辆控制信号。在三个CARLA基准上进行的实验显示,与现有算法分别达到27.20%,33.47%和15.54%的驾驶得分的显着提高,分别实现了最新性能,系统运行高达22.57 fps。
威利斯顿路多式联运范围界定研究
• 虽然该地区已增设自行车道,但这仍不能满足该地区自行车骑行者的全部需求,尤其是对那些经验不足的骑行者而言,而且完全越野骑行的选择尚未探索。该计划将专门研究探索为这些用户群体提供服务的方案。
步行 - 生态转型部
然后,我们希望让自行车成为一种比个人汽车更方便、更便捷的本地出行替代品。这尤其涉及到更好地将自行车的使用与公共交通结合起来并促进多式联运。正是怀揣着这一目标,我们将在国家前所未有的财政投入下,继续在法国各地建设自行车基础设施。由首届自行车计划创建的主动出行基金将得到续期,并在五年内每年拨款2.5亿欧元。这些措施将使我们在2027年达到8万公里的安全自行车道,在2030年达到10万公里的安全自行车道。
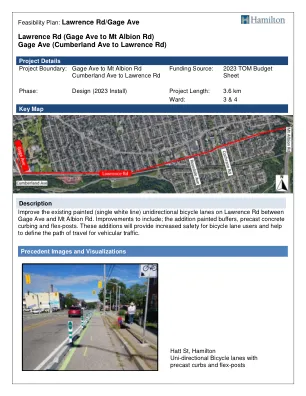
可行性计划:Lawrence Rd/Gage Ave
理由 Lawrence Rd 是一条东西向连通性极佳的次要干道。现有的自行车道连接东部的 Red Hill Valley Trail 和西部的 Gage Park。现有自行车道的升级将包括涂漆缓冲垫、预制混凝土路缘和柔性柱。护栏的升级将增加缓冲分离,同时提高用户的安全性和舒适度。根据自行车设施图表(OTM Book 18)和完整的街道审计工具,这条支路应该有一个指定的自行车操作空间,整个项目期间将用涂漆缓冲垫和柔性柱标记。

视觉零行动计划2025
在过去三年中,零视觉零工作组使州和地方政府官员与社区和倡导团体并排,以实现零交通死亡的目标。在这一进展方面的发展,在下一个五年的行动计划中,特遣部队概述了费城的距离零之路。这些努力是建立完整街道办公室的基础,以及我在市议会和州议会中的同事的工作,他们倡导了使街道更安全的努力。过去三年来,我们的成就包括在罗斯福大道上安装自动速度摄像头,增加了超过37英里的新自行车道,包括超过10英里的受保护自行车道,以及超过58英里的街道。

使用商业模式画布和 CRISP-DM 自行开发混合商业模式
我们认为,“经典”商业模式和数据驱动商业模式之间的区别在于,数据驱动商业模式从数据中创造价值。重要的是认识到可以通过不同的方式从数据中创造价值。在此,标准化方法也提供了可能的单独步骤。实践证明,“跨行业数据挖掘标准流程”(简称CRISP-DM)(图2)是行之有效的。这种“数据挖掘”结构——在工业背景下,现在主要被称为“机器学习”——被设计为一个循环过程,并包含各个步骤的有意义的细分。这些步骤中的大多数本身都代表了数据方面的价值创造,因此可以作为商业模式的价值创造核心。相反,这意味着您 BMC 中的(数字)业务模型的核心可以通过 CRISP-DM 逐步开发。因此,它是进入混合商业模式世界的理想且廉价的途径。
使用深度学习的道路车道线检测
摘要:道路车道线检测对于自动驾驶系统和高级驾驶员辅助系统(ADAS)至关重要。但是,在复杂的交通场景中,诸如阴影,公路模糊和稀疏标记之类的挑战阻碍了准确的检测和实时性能。该项目通过使用Python和OpenCV实施车道检测算法来解决这些问题。该算法通过预处理图像,采用颜色阈值和边缘检测等技术来增强检测,并利用Hough变换来实现车道边界标识。它提供了涵盖图像处理,计算机视觉和OPENCV的全面指南,以及克服挑战的策略。此外,它引入了一种多阶段算法,该算法结合了预处理,特征提取,实例分割,以进行精确的泳道描述以及后处理以进行精制结果。通过实验,这种方法证明了卓越的性能,确保了各种道路条件和环境之间可靠的车道检测,从而有助于自主驾驶技术的发展。