XiaoMi-AI文件搜索系统
World File Search System自适应

带高压启动的自适应多模式PWM 控制器
当 HV 脚施加大于 40V 的电压时,内部高压电流源 对 V CC 脚外接的电容充电。为防止 V CC 在启动过程中短 路引起的功率损耗而使 IC 过热损坏,当 V CC 电压低于 1V 时,高压电流源的充电电流被限制为 I HV1 ( 1mA )。 当 V CC 大于 1V 后,高压电流源的充电电流变为 4mA_min , V CC 电压会迅速上升。当 V CC 超过启动水平 V CC_ON 时,高压启动电流源关闭。同时, UVLO 置高有 效, IC 内部电路开始工作。

多尺度特征交互的伪标签无监督域自适应行人重识别
刘仲民,杨富君,胡文瑾 .多尺度特征交互的伪标签无监督域自适应行人重识别 [J].光电工程, 2025 , 52 (1): 240238 Liu Z M, Yang F J, Hu W J. Multi-scale feature interaction pseudo-label unsupervised domain adaptation for person re- identification[J].Opto-Electron Eng , 2025, 52 (1): 240238


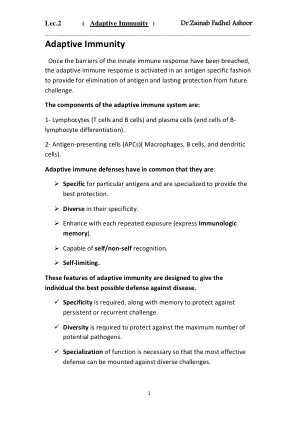
自适应免疫
作为“从先天到适应性免疫 - 记忆问题”研讨会的科学组织者,我们想向我们的朋友和同事致敬,并于2024年7月1日至2日在柏林加入我们。我们期待在一起度过美好的几天。我们对在研讨会,主席会议和参加海报会议上发言的邀请的积极回应感到高兴。您可以从该计划中看到,先天和适应性免疫领域的许多最好的头脑将加入我们,讨论免疫学上最新的科学发展。在两天内,我们计划了两次特殊的主题演讲,七个全体会议和一个卫星研讨会。由于对海报演示的需求很高,我们添加了额外的海报会议,以适应尽可能多的早期研究人员。我们鼓励所有参与者与许多将参加这些海报会议的杰出科学家互动。此外,欧洲研究委员会(ERC)的资金机会计划于7月1日举行,这可能会极大地使许多参与者受益。研讨会的最后卫星会议“翻译先天和适应性免疫疗法”有望成为一个亮点,其中包括关键开局的领导者,从临床和行业的角度讨论转化免疫治疗。

自适应免疫
作为“从先天到适应性免疫 - 记忆问题”研讨会的科学组织者,我们想向我们的朋友和同事致敬,并于2024年7月1日至2日在柏林加入我们。我们期待在一起度过美好的几天。我们对在研讨会,主席会议和参加海报会议上发言的邀请的积极回应感到高兴。您可以从该计划中看到,先天和适应性免疫领域的许多最好的头脑将加入我们,讨论免疫学上最新的科学发展。在两天内,我们计划了两次特殊的主题演讲,七个全体会议和一个卫星研讨会。由于对海报演示的需求很高,我们添加了额外的海报会议,以适应尽可能多的早期研究人员。我们鼓励所有参与者与许多将参加这些海报会议的杰出科学家互动。此外,欧洲研究委员会(ERC)的资金机会计划于7月1日举行,这可能会极大地使许多参与者受益。研讨会的最后卫星会议“翻译先天和适应性免疫疗法”有望成为一个亮点,其中包括关键开局的领导者,从临床和行业的角度讨论转化免疫治疗。


自适应电穿孔技术
IGEA UK Suites 1 & 2, Parkhill Business Centre Suites 1 & 2, Parkhill Business Centre Annexe, Walton Road, Wetherby, Annexe, Walton Road, Wetherby, West Yorkshire LS22 5DZ, UK West Yorkshire LS22 5DZ, UK 电话:+44 1937 547065 电话:+44 1937 547065 www.igeamedical.co.uk www.igeamedical.co.uk info.uk@igeamedical.com info.uk@igeamedical.com www.igeamedical.com www.igeamedical.com
