XiaoMi-AI文件搜索系统
World File Search System致动器

低漂移推力平衡,高分辨率
虽然 AST 推力平衡器目前的状态已经超出了其设计目标,但它还有进一步改进的潜力,以实现更高的分辨率和更低的噪音。从我们的角度来看,机械结构似乎尚未达到极限。目前,AST 正在构建基于非常相似的机械设计的推力平衡器的新版本,它将具有改进的电子元件。目前,音圈致动器能够产生从 -1.8 N 到 1.8 N 范围内的力,固有分辨率为 16 位,通过插值技术略有增强。新版本的推力平衡器将使用分辨率更高的组件,因此在高达 1 N 的整个测量范围内表现出更好的性能。此外,还将开发一种专用于推力噪声测量的新型音圈电流源。它仅覆盖较小的推力范围,从而显着提高分辨率并降低此特定应用的噪音。在目前的状态下,推力平衡电子设备仅由标准型部件组成。在全新改进的电路设计的关键部分使用低噪声部件也有望显著降低整体本底噪声。作为一项附加功能,新型推力平衡器将配备第二个独立的现场校准装置,该装置基于物理原理而非音圈致动器。因此,这种新装置与现有的第二个音圈致动器相结合,将提供两种独立的现场校准方法,从而实现绝对推力测量的高精度。

探针 单执行器 尺蠖 神经微驱动
摘要 神经科学中的各种技术都涉及将单个探针放置在大脑的精确位置。然而,使用这种方法对大脑进行大规模测量和操作受到严重限制,因为无法将探针定位系统小型化。在这里,我们提出了一种全新的远程控制微定位方法,该方法由新型相变材料填充电阻加热器微夹钳组成,这些微夹钳以尺蠖电机配置排列。夹钳的微观尺寸、稳定性、轻柔的夹持动作、单独的电子控制和高封装密度允许使用单个压电致动器对许多任意形状的探针进行微米精度的独立定位。这种多探针单致动器设计显著减小了尺寸和重量,并允许微驱动器的潜在自动化。我们展示了在急性和慢性制剂中将多个电极准确放置在体内大鼠海马中。因此,我们的机器人微驱动器技术应该能够扩大神经科学和其他领域的多种多探针应用。

用于控制大型软执行器阵列的流体多路分解器
软机器人领域致力于创造大部分(如果不是全部)柔软的机器人。虽然软致动器和软传感器都取得了重大进展,但在软控制系统的开发方面所做的工作相对较少。这项研究提出了一种软微流体多路分解器作为软机器人的潜在控制系统。多路分解器只需几个输入即可控制许多输出,增加了软机器人的复杂性,同时最大限度地减少了对外部阀门和其他外部组件的依赖。这项研究中的多路分解器改进了早期的微流体多路分解器,输入减少了近两倍,这一设计特点简化了控制并提高了效率。此外,这项研究中的多路分解器旨在适应软机器人所需的高压力和流速。多路分解器的特征从单个阀门级别到完整的系统参数,其功能通过控制一系列可单独寻址的软致动器来展示。

连续膜表面微加工硅变形镜
表面微加工的一个成功光学应用是开发静电驱动微机械镜阵列(由可移动的反射或折射元件组成的大规模并行阵列),用于投影显示系统。1 每个元件都是一个镜面部分,可用作大型显示器中的一个像素,元件的驱动通过二进制数字控制信号并行协调。在这种系统中,已证明简单微机械致动器的制造成品率可以接近 100%。此外,已证实可以实现电子器件与微机电系统(MEMS)阵列结构的大规模集成。这种集成是通过在平面化 CMOS 电子器件阵列上构建 MEMS 结构来实现的。已提出了这些基本概念的几种扩展,以便开发用于自适应光学系统的表面微加工连续膜可变形镜。在自适应光学中,重要的是可变形镜既要连续又要精确可调。本文描述的装置是使用表面微加工技术制造的第一种连续镜。~ 体微加工连续镜之前已经展示过。2 ! 波士顿大学设计、制造和测试了表面微加工镜。该装置由单个柔性光学膜组成,该膜由多个附件支撑,这些附件位于表面法向静电致动器的底层阵列上。该装置有两个特点与以前的表面微加工镜系统不同。首先,镜面是连续的,而不是分段的。因此,致动器的局部变形会导致镜面平滑偏转,表面轮廓没有不连续性,没有由于分段边缘而导致的衍射干扰,也没有由于填充因子低于 1 而导致的光强度损失。此外,新的可变形镜装置允许精确、连续地控制镜面膜。
连续膜表面微加工硅变形镜
表面微加工的一个成功光学应用是开发静电驱动微机械镜阵列(由可移动的反射或折射元件组成的大规模并行阵列),用于投影显示系统。1 每个元件都是一个镜面部分,可用作大型显示器中的一个像素,元件的驱动通过二进制数字控制信号并行协调。在这种系统中,已证明简单微机械致动器的制造成品率可以接近 100%。此外,已证实可以实现电子器件与微机电系统(MEMS)阵列结构的大规模集成。这种集成是通过在平面化 CMOS 电子器件阵列上构建 MEMS 结构来实现的。已提出了这些基本概念的几种扩展,以便开发用于自适应光学系统的表面微加工连续膜可变形镜。在自适应光学中,重要的是可变形镜既要连续又要精确可调。本文描述的装置是使用表面微加工技术制造的第一种连续镜。~ 体微加工连续镜之前已经展示过。2 ! 波士顿大学设计、制造和测试了表面微加工镜。该装置由单个柔性光学膜组成,该膜由多个附件支撑,这些附件位于表面法向静电致动器的底层阵列上。该装置有两个特点与以前的表面微加工镜系统不同。首先,镜面是连续的,而不是分段的。因此,致动器的局部变形会导致镜面平滑偏转,表面轮廓没有不连续性,没有由于分段边缘而导致的衍射干扰,也没有由于填充因子低于 1 而导致的光强度损失。此外,新的可变形镜装置允许精确、连续地控制镜面膜。
微系统和可靠性 - Utm.md
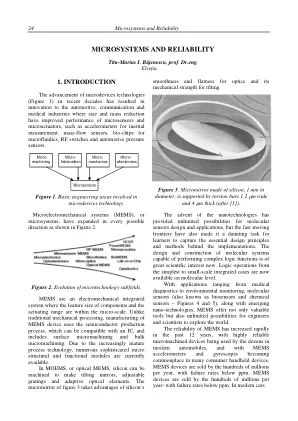
图 7. 用于横向原子力显微镜 (AFM) 测量的集成尖端的静电硅致动器的 SEM 细节图(根据 [3])。 微结构和微元件:不是传感器或致动器的微型部件。例如:微透镜、镜子、喷嘴和梁;这些部件必须与其他元件组合才能提供有用的功能。 微系统和微仪器:将上述几种元件与适当的电子封装集成到微型系统或仪器中。它们往往非常特定于应用。例如:微型激光器、微型光谱仪、光学化学分析仪。制造这类系统的经济性往往使商业化变得困难。 微系统的工业应用:薄膜磁头、光盘、汽车部件、喷墨打印头、医疗应用、化学和环境应用。 4. 喷墨打印头 • 目前是微系统技术最大的应用之一。 • 一台典型的喷墨打印机每年要用掉好几个墨盒。 • 当今的喷墨打印机的分辨率为每英寸 1200 点 (dpi)。
连续膜表面微机械硅...
表面微加工成功的光学应用之一是开发静电驱动微机械镜阵列(协调、可移动的反射或折射元件的大规模并行阵列),用于投影显示系统。1 每个元件都是一个镜段,用作较大显示器中的一个像素,元件的驱动使用二进制数字控制信号并行协调。在这样的系统中,已经证明简单微机械致动器的制造成品率可以接近 100%。此外,已经确定可以实现电子器件与微机电系统(MEMS)阵列结构的大规模集成。这种集成是通过在平面化的 CMOS 电子阵列上构建 MEMS 结构来实现的。已经提出了这些基本概念的几种扩展,以便开发用于自适应光学系统的表面微机械连续膜可变形镜。在自适应光学中,重要的是可变形镜既连续又可精确调节。本文描述的设备是使用表面微机械技术制造的第一种连续镜。� 体微机械连续镜之前已经展示过。2 � 表面微机械镜已在波士顿大学设计、制造和测试。该设备由单个柔性光学膜组成,该膜由多个附件支撑,这些附件位于底层表面法向静电致动器阵列上。两个特点将该设备与以前的表面微机械镜系统区分开来。首先,镜面是连续的,而不是分段的。因此,致动器的局部变形会导致镜面平滑偏转,表面轮廓没有不连续性,没有因分段边缘而产生的衍射干涉,也没有因填充因子低于 1 而导致的光强度损失。此外,新的可变形镜面装置可以精确、连续地控制镜面元件
连续膜表面微加工硅变形镜
表面微加工的一个成功光学应用是开发静电驱动微机械镜阵列(由可移动的反射或折射元件组成的大规模并行阵列),用于投影显示系统。1 每个元件都是一个镜面部分,可用作大型显示器中的一个像素,元件的驱动通过二进制数字控制信号并行协调。在这种系统中,已证明简单微机械致动器的制造成品率可以接近 100%。此外,已证实可以实现电子器件与微机电系统(MEMS)阵列结构的大规模集成。这种集成是通过在平面化 CMOS 电子器件阵列上构建 MEMS 结构来实现的。已提出了这些基本概念的几种扩展,以便开发用于自适应光学系统的表面微加工连续膜可变形镜。在自适应光学中,重要的是可变形镜既要连续又要精确可调。本文描述的装置是使用表面微加工技术制造的第一种连续镜。~ 体微加工连续镜之前已经展示过。2 ! 波士顿大学设计、制造和测试了表面微加工镜。该装置由单个柔性光学膜组成,该膜由多个附件支撑,这些附件位于表面法向静电致动器的底层阵列上。该装置有两个特点与以前的表面微加工镜系统不同。首先,镜面是连续的,而不是分段的。因此,致动器的局部变形会导致镜面平滑偏转,表面轮廓没有不连续性,没有由于分段边缘而导致的衍射干扰,也没有由于填充因子低于 1 而导致的光强度损失。此外,新的可变形镜装置允许精确、连续地控制镜面膜。
连续膜表面微加工硅变形镜
表面微加工的一个成功光学应用是开发静电驱动微机械镜阵列(由可移动的反射或折射元件组成的大规模并行阵列),用于投影显示系统。1 每个元件都是一个镜面部分,可用作大型显示器中的一个像素,元件的驱动通过二进制数字控制信号并行协调。在这种系统中,已证明简单微机械致动器的制造成品率可以接近 100%。此外,已证实可以实现电子器件与微机电系统(MEMS)阵列结构的大规模集成。这种集成是通过在平面化 CMOS 电子器件阵列上构建 MEMS 结构来实现的。已提出了这些基本概念的几种扩展,以便开发用于自适应光学系统的表面微加工连续膜可变形镜。在自适应光学中,重要的是可变形镜既要连续又要精确可调。本文描述的装置是使用表面微加工技术制造的第一种连续镜。~ 体微加工连续镜之前已经展示过。2 ! 波士顿大学设计、制造和测试了表面微加工镜。该装置由单个柔性光学膜组成,该膜由多个附件支撑,这些附件位于表面法向静电致动器的底层阵列上。该装置有两个特点与以前的表面微加工镜系统不同。首先,镜面是连续的,而不是分段的。因此,致动器的局部变形会导致镜面平滑偏转,表面轮廓没有不连续性,没有由于分段边缘而导致的衍射干扰,也没有由于填充因子低于 1 而导致的光强度损失。此外,新的可变形镜装置允许精确、连续地控制镜面膜。