XiaoMi-AI文件搜索系统
World File Search System获取图像

有机和无机兴奋剂的效果...
本文提出了使用摄像机使用Agisoft和CloudCompare软件创建工程对象的3D公制模型的可能性。传统的摄影测量技术并不总是与市场所需的生产紧迫性相匹配。复杂性,从而导致成本,时间和工作的繁琐。此处称为视频图表技术的摄像机技术的使用可与拍照相媲美,但是,它允许加快获取数据的过程,在许多情况下,这是任何B Anyb任何项目或研究的关键元素。进行了三个拍摄对象的3D建模质量的分析,这使作者可以完善获取图像以进行空间分析的过程。“视频图”的应用技术与拍照相当,但允许数据采集过程加快加速,在许多情况下,这是现场研究的关键要素。来自非金属摄像机的3D对象视频由Agisoft Metashape处理。为了能够评估视频图数据的准确性,使用了良好的激光扫描仪技术的数据进行比较。激光扫描仪数据已在Autodesk recap中进行了预处理。手动注册是通过三项扫描中的14分进行的。将两个3D模型导出到CloudCompare软件进行比较和进一步分析。对拍摄的三个对象的3D建模质量进行了分析,从而可以完善获取图像以进行空间分析的过程。本文介绍了使用非金属手机摄像机“视频图”的可能性,以使用Agisoft和CloudCompare软件创建工程对象的公制3D模型。在CloudCompare中进行了注册,云到云(C2C)和配置文件分析,以确定由视频图数据所产生的3D模型的不确定性确定为两个模型之间的分离距离。结果表明,激光扫描仪和视频图中的分离平均距离得出的3D模型点云为34厘米,XY平面的平均轮廓分离为25 cm,Z平面为1.9 cm。使用云到云PCV确定平均差84 cm。
单光子敏感相机、传感器和模块
虽然共聚焦显微镜是生物医学成像实验室的主力,为图像对比度和质量树立了黄金标准,但逐点获取图像的速度本来就很慢。为了突破这一速度障碍,Photon Force 客户使用 PF32 构建了开创性的多光束共聚焦显微镜架构:用光束阵列取代典型共聚焦显微镜的单光束和针孔,以快速扫描图像平面。返回点与 SPAD 阵列的感光区域对齐,这些区域充当虚拟针孔,可阻挡失焦光。由于每个光束和 SPAD 阵列像素对都完全独立且并行运行,因此最终的系统可以将共聚焦荧光寿命显微镜的速度提高几个数量级。

CRISPR耗竭可以对复杂样品中病毒和细菌种群的敏感鉴定。
图4:将HELA细胞接种在苯酯96孔微孔板(15,000个细胞/孔)中,并在37°C下孵育48H,5%CO 2孵育。活细胞用现象641线粒体染色(0.5 µm)在37°C下染色30分钟,然后固定并透化。接下来,将细胞与细胞绘画混合物孵育,其中包括现象512核酸染色(3 µm),现象Hoechst 33342核染色(5 µg/mL),势氟568-腓罗(33 nm),33 nm),现象488 -contovue fluor 488 -contavue fluor 488 -contavue a(contavue fluor a fluor fulor a fluor a fluor)a(100 µgla)an(100 µL)5和m。最小在RT。在Operetta CLS高气结分析系统上获取图像。

HDW-F900R - 索尼专业版
最初的 HDW-F900 摄像机现已发展成为下一代 HDW-F900R,将 CineAlta 性能与各种新功能相结合。这款新摄像机根据 CIF(通用图像格式)标准获取图像,该标准指定 1920 x 1080 有效像素(水平 x 垂直)的采样结构。除了以 24P 录制外,HDW-F900R 摄像机还可切换为以 23.98P、25P 和 29.97P 逐行扫描以及 50 或 59.94 Hz 隔行扫描录制。该摄像机还提供了一系列用于创意拍摄的综合功能,例如增强的伽马功能和比色控制。HDW-F900R 的设计非常紧凑轻便,为用户在拍摄时提供了更高的移动性和舒适度。为了进一步增强摄像机的创意和操作多功能性,提供了多种可选配件。其中包括图像缓存板、2-3 下拉和下转换器板以及慢速快门板。结合其 24P 功能,这些新功能使 HDW-F900R 成为拍摄电视连续剧、纪录片、商业广告和电影的理想摄像机。

使用
关键词:光束法区域网平差、自校准、系统校准、非度量相机 摘要 使用市售的非度量相机(例如佳能、尼康)进行摄影测量操作正变得非常流行。使用它们的原因有几个,例如有效载荷更轻、传感器成本低、尺寸更小,以适应有限的机载空间(例如无人机作为数据采集平台)、快速周转项目、易于更换等。与使用数字高分辨率度量图像传感器(Hexagon DMC、Microsoft Vexcel UltraCam 系统等)相比,所有这些属性都具有优势。然而,为了获得接近使用度量系统获得的结果,必须考虑上述非度量图像传感器的所有系统误差;对它们进行建模并消除(或尽量减少)它们对所获取图像的影响。本文回顾了与使用非度量图像传感器相关的功能和随机模型。将关注传感器内部校准参数,即校准焦距、主点、对称 - 非对称 - 切向镜头畸变模式和可能严重扭曲所获取图像的其他偏差。为此,使用焦距为 50 毫米的尼康 D810 数码相机在摄影测量测试场区域“Franklin Mills Mall”进行相机校准。该场地覆盖了多个飞行高度,分别产生 15 和 30 厘米 GSD 的图像。飞行了两个垂直摄影测量飞行带,具有高端搭接和侧搭接。测试场区域拥有大约 25 个目标控制和检查点,这些点的测量精度为 2 厘米或更高。使用 PIX4Dmapper(专为从无人机或地面获取的图像而创建的软件包)对上述图像进行自动空中三角测量。导出图像观测结果(ASCII),并使用汉诺威莱布尼茨大学程序系统 BLUH 进行相应的束流区域调整,该系统能够通过附加参数(十二个标准加上不同失真模式的中型非度量数字相机)进行自我校准。调查中使用了不同数量和分布的地面控制点 (GCP) 和检查点 (ChkPts)。本文介绍了结果。

机智号火星直升机摄像机:描述和结果
毅力号科学与运营团队。除了在飞行过程中获取图像外,着陆时的 RTE 图像也在地面获取(图 3)。RTE 图像中心的角像素尺度约为 0.53 mrad/像素,边缘的角像素尺度约为 0.33 mrad/像素。在典型的着陆 RTE 图像中心(如图 3 所示,位于车辆前方约 0.2 米处),空间尺度约为 0.1 mm/像素。大多数飞行中的图像是在约 5-10 米的高度获取的。表 2 列出了每台摄像机在一系列直升机高度下的空间分辨率。图像在地球上接收后,被处理成各种衍生图像产品,包括立体衍生的数字地形模型 (DTM) 和正射影像(图 4)。表 2. 摄像机空间尺度与直升机高度

使用机器学习的水稻谷物检测系统
稻米是一种重要的主食,是从100多个国家 /地区跨越1.63亿公顷土地的地区收获的,以满足全球约35亿人口的食物需求。实验结果表明,识别整个米饭的正确率超过95%。将借助彩色数码相机获取图像,并执行不同的操作,例如预处理,背景估计和RGB到二进制转换。第二步是构建用于系统培训的数据库。系统通过至少100张具有白色背景的大米的图像来训练。以形态特征,特征值和所有数据库图像的向量形式的数据将存储。分类和质量分析是通过将示例图像与数据库进行比较来完成的。手动质量分析耗时且昂贵。根据物理和化学特性,提出了用于质量分析质量分析的替代解决方案。物理特性包括大小,形状,粉笔,铣削程度,而化学特性则包括胶质化和温度。
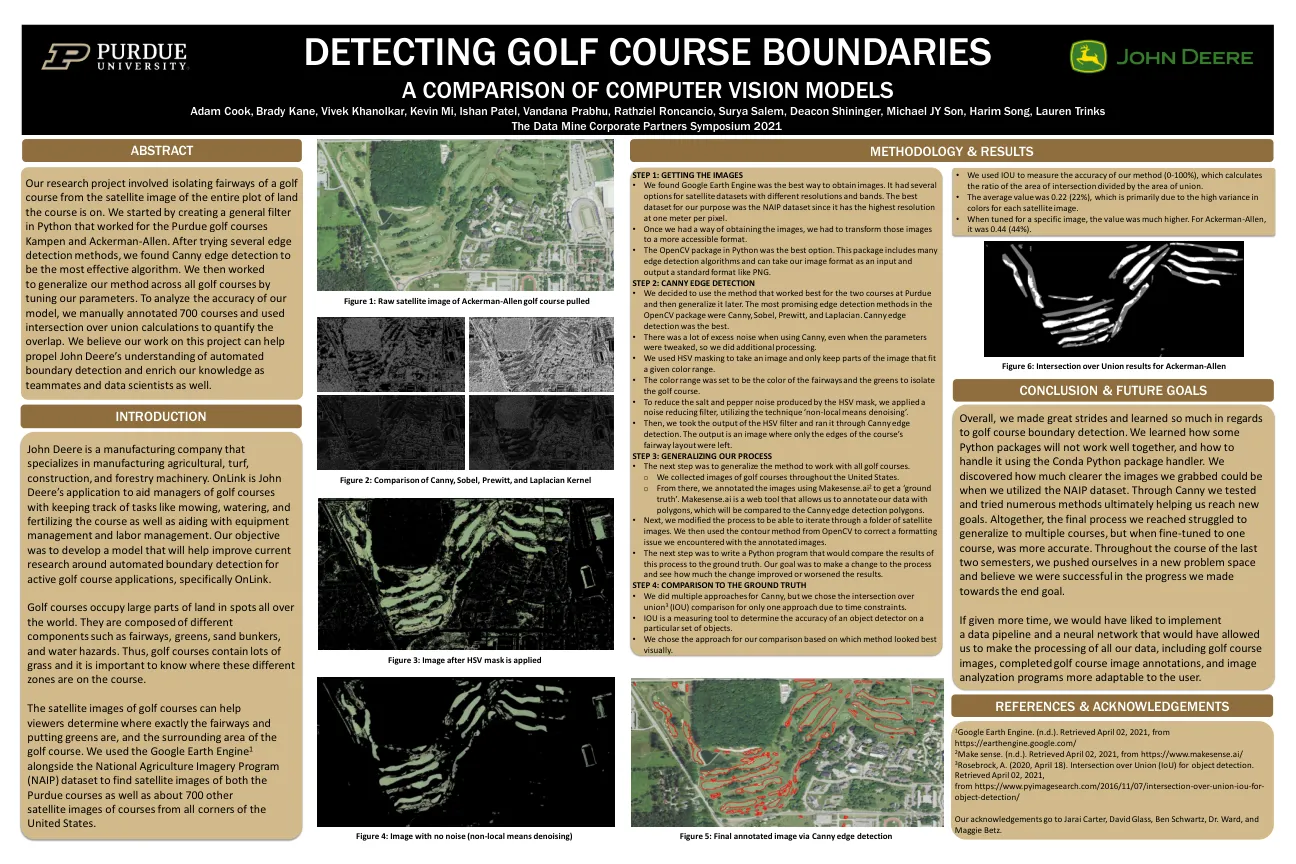
计算机视觉模型的比较
步骤1:获取图像•我们发现Google Earth Engine是获取图像的最佳方法。它有几种具有不同分辨率和频段的卫星数据集的选项。最适合我们目的的数据集是NAIP数据集,因为它的分辨率最高,每个像素为1米。•一旦我们有了获得图像的方法,我们就必须将这些图像转换为更容易访问的格式。•Python中的OpenCV软件包是最好的选择。此软件包包括许多边缘检测算法,可以将我们的图像格式作为输入,并输出标准格式(如PNG)。步骤2:Canny Edge检测•我们决定使用最适合Purdue这两个课程的方法,然后再将其推广。OPENCV包装中最有希望的边缘检测方法是Chany,Sobel,PreWitt和Laplacian。精明的边缘检测是最好的。•使用CANNY时,即使参数进行了调整,也存在很多多余的噪音,因此我们进行了额外的处理。•我们使用HSV掩码拍摄图像,仅保留适合给定颜色范围的图像的一部分。•颜色范围设置为球道和绿色的颜色,以隔离高尔夫球场。•为了减少HSV面膜产生的盐和胡椒噪声,我们使用了“非本地含量降解”技术,应用了降噪过滤器。•然后,我们采用了HSV过滤器的输出,并通过Canny Edge检测来运行它。输出是仅保留课程球道布局边缘的图像。o我们收集了整个美国高尔夫球场的图像。步骤3:概括我们的过程•下一步是概括与所有高尔夫球场一起使用的方法。o从那里,我们使用mageense.ai 2注释图像以获得“地面真相”。maveense.ai是一种Web工具,它允许我们用多边形注释数据,这将与Canny Edge检测多边形进行比较。•接下来,我们修改了该过程,以便能够通过卫星图像的文件夹迭代。然后,我们使用OPENCV的轮廓方法来纠正我们使用带注释的图像遇到的格式问题。•下一步是编写一个Python程序,将该过程的结果与地面真相进行比较。我们的目标是改变过程,看看变化有多改善或恶化结果。步骤4:与地面真相进行比较•我们为Canny做了多种方法,但是由于时间限制,我们选择了仅使用一种方法的联合3(IOU)比较的交集。•IOU是一种测量工具,可以确定对象检测器在特定对象集上的准确性。•我们选择了基于哪种方法在视觉上看起来最好的比较方法。

低成本摄影测量潜力...
a 罗斯托克大学,大地测量学和地理信息学主席,J.-v.-Liebig Weg 6, 18059 罗斯托克,德国 - goerres.grenzdoerffer@uni-rostock.de b 汉堡战斗中心,Großmoorbogen 8, 21079 汉堡 - aengel1980@googlemail.com c 德累斯顿应用技术大学,测量和制图系,Friedrich-List-Platz 1, 01069 德累斯顿 - teichert@htw-dresden.de 第一委员会 ICWG I/V - ThS-23 关键词:数字机载成像系统、无人机、农业、精度评估、林业 摘要:总重量在 5 公斤以下的微型无人机 (无人驾驶飞机或无人驾驶飞机) 是农业和林业应用有趣的替代载体。与标准机载航测相比,无人机更加灵活,不受天气影响。因此,微型无人机勘测将为经济实惠、最新和准确的地理信息铺平道路。在多个地点对两种不同系统进行的实际测试表明,这两种系统都能够以系统的方式获取图像。然而,为了获得适合 GIS 的摄影测量产品,所需的后期处理工作量相当大。微型无人机直接地理配准的摄影测量潜力相当大,但到目前为止尚未得到充分利用。这主要是因为无人机制造商不了解和不熟悉摄影测量和 GIS 数据采集的特殊要求,例如测量相机、系统航测、精确

通过模拟评估轨道转移对 Diwata-2 微卫星运行的影响
摘要 — 自 2018 年 10 月 29 日发射以来,Diwata-2 已在轨运行三年。因此,其轨道配置的影响比早期阶段更加明显。本文研究了轨道漂移对影响卫星运行的当前问题(如卫星通信和图像质量)的影响。通过五次模拟,包括确定可接受的通行极限、菲律宾上空的顶点事件、通行时间的变化以及卫星时间分辨率的变化,发现卫星通行时间与发射时的设计时间相差了一个多小时。其节点进动率增加,导致通行时间推迟。卫星的时间分辨率也从 31 天变为 11 天,但代价是覆盖面积减少。使用历史双线元素 (TLE) 数据,还模拟了未来的通行。结果发现,目前存在天底指向盲区问题,覆盖了菲律宾整个面积的 58%。还进行了两项预测,以确定卫星何时在当地时间下午 3 点通过。第一种是使用卫星中天事件的线性回归,第二种是使用卫星的历史 TLE。两种预测都一致认为该事件将在 2023 年 8 月发生。因此,在此限制之后,大部分通过都不适合获取图像。