机构名称:
¥ 1.0
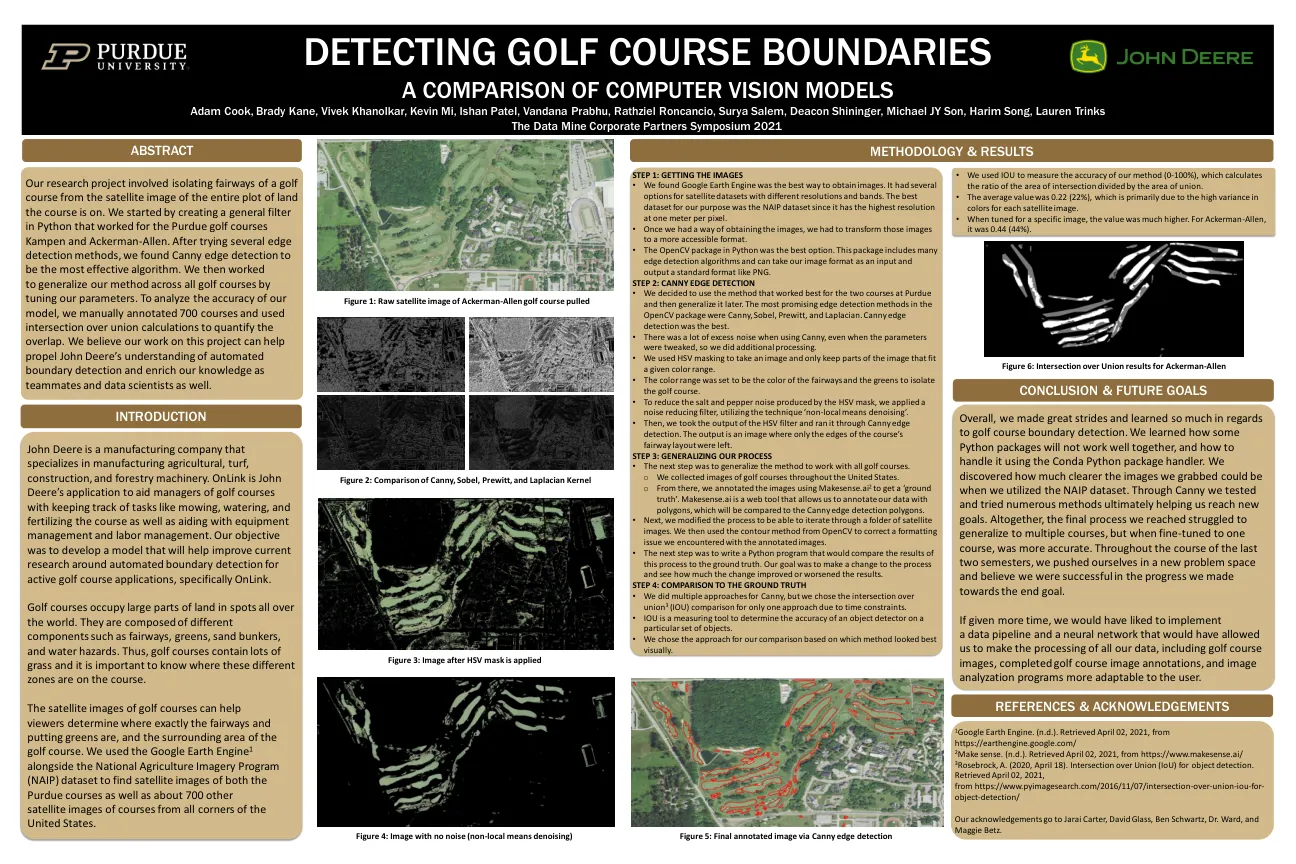
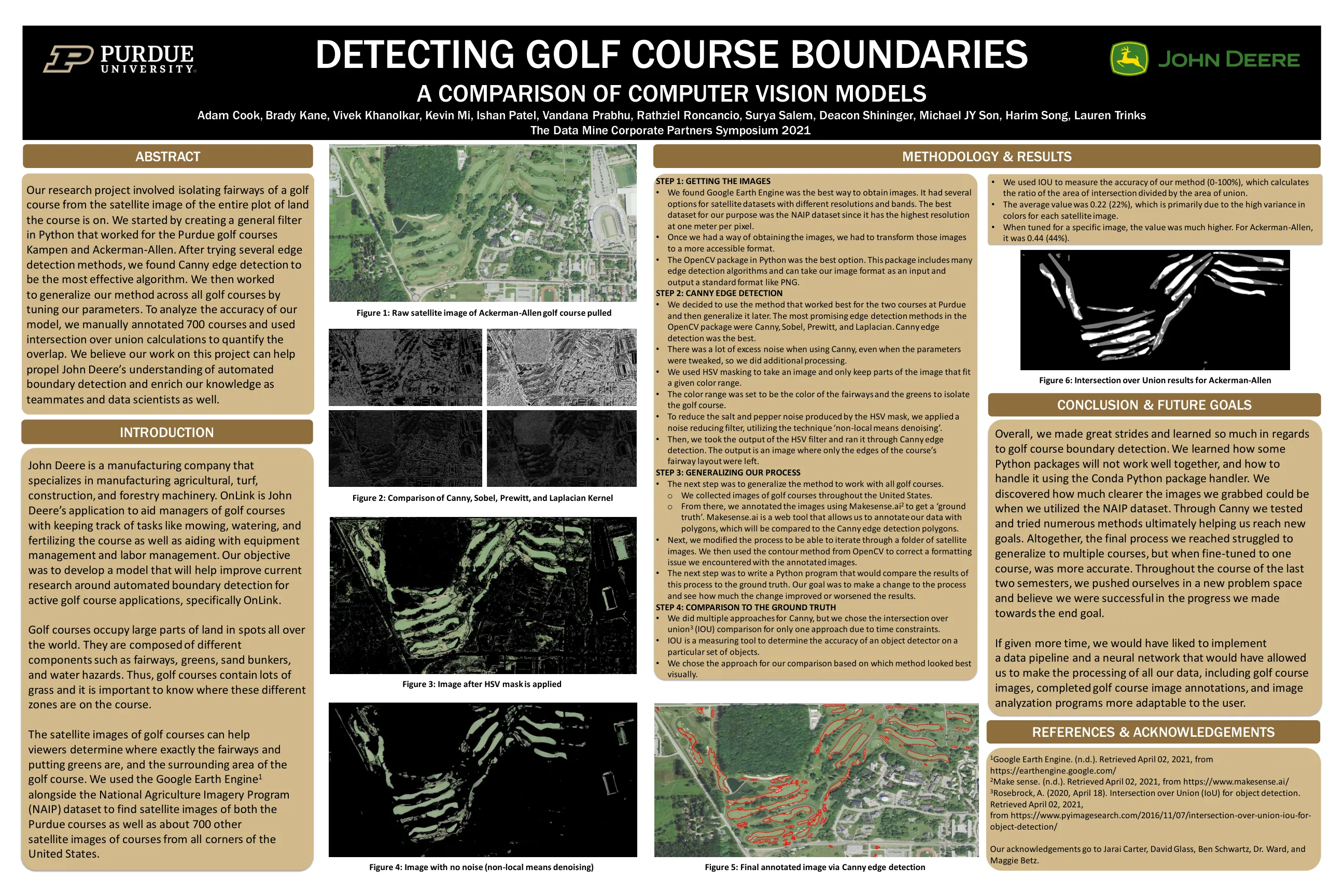
步骤1:获取图像•我们发现Google Earth Engine是获取图像的最佳方法。它有几种具有不同分辨率和频段的卫星数据集的选项。最适合我们目的的数据集是NAIP数据集,因为它的分辨率最高,每个像素为1米。•一旦我们有了获得图像的方法,我们就必须将这些图像转换为更容易访问的格式。•Python中的OpenCV软件包是最好的选择。此软件包包括许多边缘检测算法,可以将我们的图像格式作为输入,并输出标准格式(如PNG)。步骤2:Canny Edge检测•我们决定使用最适合Purdue这两个课程的方法,然后再将其推广。OPENCV包装中最有希望的边缘检测方法是Chany,Sobel,PreWitt和Laplacian。精明的边缘检测是最好的。•使用CANNY时,即使参数进行了调整,也存在很多多余的噪音,因此我们进行了额外的处理。•我们使用HSV掩码拍摄图像,仅保留适合给定颜色范围的图像的一部分。•颜色范围设置为球道和绿色的颜色,以隔离高尔夫球场。•为了减少HSV面膜产生的盐和胡椒噪声,我们使用了“非本地含量降解”技术,应用了降噪过滤器。•然后,我们采用了HSV过滤器的输出,并通过Canny Edge检测来运行它。输出是仅保留课程球道布局边缘的图像。o我们收集了整个美国高尔夫球场的图像。步骤3:概括我们的过程•下一步是概括与所有高尔夫球场一起使用的方法。o从那里,我们使用mageense.ai 2注释图像以获得“地面真相”。maveense.ai是一种Web工具,它允许我们用多边形注释数据,这将与Canny Edge检测多边形进行比较。•接下来,我们修改了该过程,以便能够通过卫星图像的文件夹迭代。然后,我们使用OPENCV的轮廓方法来纠正我们使用带注释的图像遇到的格式问题。•下一步是编写一个Python程序,将该过程的结果与地面真相进行比较。我们的目标是改变过程,看看变化有多改善或恶化结果。步骤4:与地面真相进行比较•我们为Canny做了多种方法,但是由于时间限制,我们选择了仅使用一种方法的联合3(IOU)比较的交集。•IOU是一种测量工具,可以确定对象检测器在特定对象集上的准确性。•我们选择了基于哪种方法在视觉上看起来最好的比较方法。
计算机视觉模型的比较
主要关键词
相关文件推荐