XiaoMi-AI文件搜索系统
World File Search System装置的

磁共振引导聚焦新型头部固定装置的设计
b 弗吉尼亚大学生物医学工程系,本科摘要聚焦超声 (FUS) 是一种新兴的非侵入性技术,为治疗多种神经系统疾病(如特发性震颤和多形性胶质母细胞瘤 (GBM))提供了一种替代方法。FUS 已被证明可以以安全和有针对性的方式破坏 BBB,然而,用于该过程的头部固定装置最初是为放射外科设计的。为此,研究小组提议开发一种用于 FUS 应用的新型头架。该设计的创建基于以下重要的总体目标:1) 减少设计笨重以最大限度地减少图像失真,2) 增加 BBBO 治疗范围,3) 最大限度地提高患者的舒适度。使用计算机辅助设计 (CAD) 软件 Fusion 360 创建设计迭代,然后 3D 打印并组装最终设计以创建原型。使用 Fusion 360 对框架进行有限元分析 (FEA),以确定安全系数和在变形前可施加到设备前部旋转旋转螺钉上的最大力。对新型头架原型进行了静态应力有限元分析,平均固定扭矩为 0.348 Nm,最大固定扭矩为 0.522 Nm。结果显示,最大力为 273.1 MPa,安全系数为 1.0,最大力为 409.7 MPa,安全系数为 0.67。关键词:FUS、BBBO、GBM、立体定向头架、FEA

立体定向神经外科微型机器人引导装置的开发
目的立体定向引导系统始终保持高精度且使用简单,对于精确的立体定向定位和缩短手术时间至关重要。尽管机器人引导系统被广泛应用,但目前可用的系统还不能完全满足结合无框架手术和机器人技术优势的立体定向引导系统的要求。作者开发并优化了一种小型但高精度的引导系统,该系统的设计使其可以无缝集成到现有的手术室 (OR) 设置中。本临床研究旨在概述这种微型机器人引导系统的开发并介绍作者的临床经验。方法在对机器人立体定向引导系统进行广泛的临床前测试后,对机器人固定、软件可用性、导航集成和末端执行器应用进行了调整。随后,在 2013 年至 2019 年期间的 150 名患者的临床系列中推进了机器人系统的开发,包括 111 次针吸活检、13 次导管置入和 26 次立体脑电图 (SEEG) 电极置入。在临床试验期间,不断进行修改以满足每种适应症的设置要求、技术规格和工作流程。对于每种应用,都会评估特定的设置、工作流程和平均手术准确度。结果在 150 例病例中,149 例可应用微型机器人系统。每个手术中的设置都成功实施,而不会增加大量的手术时间。工作流程无缝集成到现有手术中。在研究过程中,手术准确性得到了提高。对于活检手术,真实目标误差 (RTE) 从平均 1.8 ± 1.03 毫米减少至入口处的 1.6 ± 0.82 毫米 (p = 0.05),从 1.7 ± 1.12 毫米减少至目标处的 1.6 ± 0.72 毫米 (p = 0.04)。对于 SEEG 手术,RTE 从手术前半部分的平均 1.43 ± 0.78 毫米减少至后半部分入口处的 1.12 ± 0.52 毫米 (p = 0.002),从 1.82 ± 1.13 毫米减少至目标处的 1.57 ± 0.98 毫米 (p = 0.069)。所有病例均未观察到愈合并发症或感染。结论 微型机器人引导装置已成功应用于 149 例立体定向手术,证明了其多功能性和无缝集成到现有工作流程的能力。根据这些数据,机器人可以显著提高准确性,而无需增加时间支出。
高山太阳能光伏装置的优化市场价值
太阳能光伏 (PV) 是全球增长最快的可再生资源。然而,其全部潜力可能会因与市场需求和相关生产概况的不匹配而受到阻碍。在本研究中,我们使用两个瑞士电力系统的软链接优化模型,探索了阿尔卑斯山地区创新光伏布局的案例研究。使用 Swissmod(一种电力调度和负荷流模型)和 OREES(一种采用进化策略优化光伏布局的电力系统模型),我们根据多年的天气数据、各种二氧化碳价格并考虑未来欧洲电力基础设施的发展,模拟了优化光伏布局的市场价格。与低海拔光伏布局策略相比,山地布局具有更高的市场价值和更少的所需面积。更高的市场价值是由更好地与需求保持一致所驱动的,特别是在需求最高的冬季。我们发现,优化的高山布局提供的面板容量收入(欧元/千瓦/年)平均比城市光伏装置的收入高 20%。此外,瑞士山区可容纳超过 1 GW 的发电容量,收益甚至更高(33%)。阿尔卑斯山的光伏装置具有更高的市场价值和更高的价值因素,可能成为非常有利可图的投资,从系统角度来看也很有价值。© 2022 作者。由 Elsevier Ltd. 出版。这是一篇根据 CC BY-NC-ND 许可协议开放获取的文章(http://creativecommons.org/licenses/by-nc-nd/4.0/)。
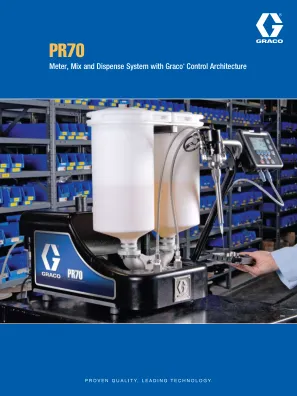
PR70——带有 Graco® 控制装置的计量、混合和分配系统...
计量泵有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.07 in 2 (4560 mm 2 ) 大型气缸有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . 15.9 in 2 (10260 mm 2 ) 最大行程长度. . . . . . . . . . . . . ................. ... . . . . . . . . . . 0.23 英寸 (5.8 毫米) 每循环容量. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0.12 – 4.3 英寸 3 (2 – 70 cc) 每 1 升 (.26 加仑) 泵循环数. . . . . . ................. ... . . . . . . . . . 1:1 至 12:1,取决于所选气缸 比率(可变). . . . . . . . . . . . . . . . . . . . . . . 1:1 至 24:1,取决于所选气缸 最大流体工作压力 . . . . . . . . . . . . . . . .................. ... ................. ... . . . . . . . . . . . . . . . . . . . . . . . . . 70° C (160° F) 尼龙活塞
PR70——带有 Graco® 控制装置的计量、混合和分配系统...
计量泵有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.07 in 2 (4560 mm 2 ) 大型气缸有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . 15.9 in 2 (10260 mm 2 ) 最大行程长度. . . . . . . . . . . . . ................. ... . . . . . . . . . . 0.23 英寸 (5.8 毫米) 每循环容量. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0.12 – 4.3 英寸 3 (2 – 70 cc) 每 1 升 (.26 加仑) 泵循环数. . . . . . ................. ... . . . . . . . . . 1:1 至 12:1,取决于所选气缸 比率(可变). . . . . . . . . . . . . . . . . . . . . . . 1:1 至 24:1,取决于所选气缸 最大流体工作压力 . . . . . . . . . . . . . . . .................. ... ................. ... . . . . . . . . . . . . . . . . . . . . . . . . . 70° C (160° F) 尼龙活塞
PR70——带有 Graco® 控制装置的计量、混合和分配系统...
计量泵有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.07 in 2 (4560 mm 2 ) 大型气缸有效面积. . . . . . . . . . . . . . . . . . . . . . . . . . 15.9 in 2 (10260 mm 2 ) 最大行程长度. . . . . . . . . . . . . ................. ... . . . . . . . . . . 0.23 英寸 (5.8 毫米) 每循环容量. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0.12 – 4.3 英寸 3 (2 – 70 cc) 每 1 升 (.26 加仑) 泵循环数. . . . . . ................. ... . . . . . . . . . 1:1 至 12:1,取决于所选气缸 比率(可变). . . . . . . . . . . . . . . . . . . . . . . 1:1 至 24:1,取决于所选气缸 最大流体工作压力 . . . . . . . . . . . . . . . .................. ... ................. ... . . . . . . . . . . . . . . . . . . . . . . . . . 70° C (160° F) 尼龙活塞

用于物体识别的直升机机载水声装置的视觉表现形式
在主动模式下,改进包括引入啁啾探测脉冲和匹配接收。通过降低表面混响水平,声纳的探测范围可以显著增加。显示使用真实全景图,带有彩色目标强度展示和回波包络(A 型显示)和电子放大镜(缩放功能)。通过引入与提供导航数据和传输目标信息的机载指挥系统的通信,两个系统都可以自动直观地表示当前的战术情况,即检测到的物体的移动。图 5 给出了显示的示例以及它如何表示目标的路线。这大大加快并改善了直升机与船舶和直升机与直升机之间的通信过程。

基于太阳能和水能的混合式反旋翼液压装置的能量参数
3 乌兹别克斯坦塔什干国立研究大学 TIIAME 电力供应和可再生能源系 4 安集延农业与农业技术研究所,乌兹别克斯坦安集延 摘要。本文分析了使用太阳能光伏和水力发电组合装置的前景,并介绍了它们的特性和能量参数。特别是,由于水力发电装置由反向转子液压装置组成,因此研究了反应叶轮和主动叶轮的动态参数与液压装置效率之间的函数关系。基于获得的图表和解析表达式,分析了喷嘴液压涡轮的能量参数与液压装置设计参数之间的关系。 1. 简介 众所周知,地球上地下燃料资源的分布不均和限制损害了各国对燃料的经济依赖。全球范围内对热能和电力的需求不断增长,导致地下燃料的价格上涨。这种情况要求在所有领域合理使用可再生能源。半导体光伏的发展以新的应用科学研究领域为特征。半导体光电转换器 (FP) 分为三代:第一代 FP;第二代 FP 和第三代 FP。第二代和第三代 AF 的开发正在积极开展。数字建模方法的出现和深入发展使研究质量显著提高。全面实施经典和量子固体物理理论的可能性,大量实验数据信息库的形成使开展更高质量、更深入和更有成效的科学研究成为可能。在这方面,可以注意到以下在基础科学和应用方面最重要的方向。首先,值得特别注意的是,可以在第一代 FP 的基础上创建多边照明元件 [1]。在这个方向上进行的理论和实验研究表明,创建具有垂直 pn 结的矩阵 FP 具有良好的前景。这种 PC 在产生高输出电压和转换集中太阳辐射的任务中具有无可争辩的优势。此外,在多边敏感设计中实现这种 FP 可以将半导体硅的消耗量减少三到四倍。其次,人们非常感兴趣的是与 FP 在干燥、炎热、大陆性和多尘气候中的运行相关的科学和应用研究,例如在中亚共和国。因此,制造适应大陆气候变化的太阳能光伏装置的任务仍然重要。在这方面,开发和实施 3D 格式的太阳能光伏电站很有前景,其中首次排除了使用平板 [2]。应该指出的是,这种发电厂在转换集中的太阳辐射方面具有竞争力。可再生能源初级潜力的自然不稳定性在全世界仍然是一个未解决的问题。因此,为了从可再生能源中获得持续的能源,正在积极开展应用研究,以创建混合发电厂:“太阳能-风能”[3]、“太阳能-光伏”、“太阳能-光伏-热能”、“太阳能-水力”[4]、“风力-水力”和“太阳能-风力-水力”。基于这项研究的结果,开发的太阳能装置的成本将降低,其经济效率将提高。然而,在小体积中积累大量的太阳辐射会导致

考虑弹簧元件的可卷曲 OLED 显示装置的机械建模
摘要:随着弯曲程度的增加,柔性显示器已发展为可弯曲、可折叠和可卷曲的显示器。由于脆性电极(例如氧化铟锡(ITO))的存在,在剧烈的弯曲变形下容易破裂和分层,降低电极的机械应力已成为关键问题。因此,柔性显示器中脆性电极的机械应力主要从弯曲半径的角度进行分析。另一方面,为了制作可卷曲的显示器,需要各种机械部件(例如滚轮和弹簧)来卷起或伸展可卷曲显示装置的屏幕。由于这些机械部件,可卷曲显示器中的脆性电极受到由于回缩力而产生的过大拉伸应力以及滚轮产生的弯曲应力。在本研究中,考虑了装置的边界条件,对可卷曲 OLED 显示器的机械变形进行了建模。引入了一种基于经典梁理论的分析模型,以研究可卷曲显示器的机械行为。此外,还利用有限元分析(FEA)分析了装置中机械部件对脆性电极的影响,并提出了通过控制显示面板中粘合剂的刚度来提高可卷曲显示器机械可靠性的策略。

基于单宁酸的锂离子储能装置的可持续阴极——迈向环保储能
(例如在智能手机或电动汽车中)。不幸的是,这些现有的储能设备仍然相当不可持续、昂贵,且容易起火,或在发生故障时爆炸。[1,2] 传统储能设备中最常见的正极材料是无机材料,例如 LiCoO 2 、LiFePO 4 或 LiMn 2 O 4,并且通常基于不可持续且有毒的重金属。[3,4] 就可持续性和价格而言,特别是基于有机电极的储能设备,其利用具有氧化还原活性的有机材料,被认为是下一代电池的有希望的候选者。[5–7] 与通常在充电和放电过程中通过插层机制运行的传统无机电极不同,有机储能装置的特点是 Li + 在表面附近不同的有机氧化还原活性位点发生存储-释放反应。由于不存在晶格转变、传输限制和发热等问题(这些问题通常会缩短无机正极材料的使用寿命),因此可以实现更高的倍率性能和更长的循环寿命。此外,有机储能设备可以成为可穿戴电子产品中柔性和可拉伸设备的绝佳候选。[8,9]