XiaoMi-AI文件搜索系统
World File Search System视觉障碍

使用AI和图像处理的盲目辅助系统
摘要:每天,数以百万计的视力障碍挑战,面临着在家中的日常任务或没有帮助的困难。根据世界卫生组织(WHO)的说法,超过2.5亿人患有视觉障碍,大约3500万人完全盲目。这种人群遇到了世界泛滥的危险,即使在街道上越过,由于他们无法感知障碍和交通,因此甚至越过街道。尽管对独立性有强烈的渴望,但许多视觉障碍的人都取决于其他人的常规任务。但是,技术的进步,尤其是计算机视觉方面,为更大的自主权提供了希望。虽然传统的辅助工具,例如白色的甘蔗,导犬和专业软件是无价的,但新兴的创新旨在通过将视觉信息转化为声音来彻底改变感知。这些事态发展具有增强的自主权和安全性的希望,从而增强了视力障碍,以增加信心来驾驶世界。关键字:失明,视觉残障,援助,独立性。

智能头戴式显示技术的设计
参与者从Kellogg Eye Center(UM)或西密歇根大学招募了与年龄相关的黄斑变性,糖尿病性视网膜病变,青光眼或色素性视网膜炎的参与者。一般纳入标准:•年龄≥18岁,自我报告的视觉障碍一般排除标准:•诊断认知障碍,对口译员的需求或身体残疾
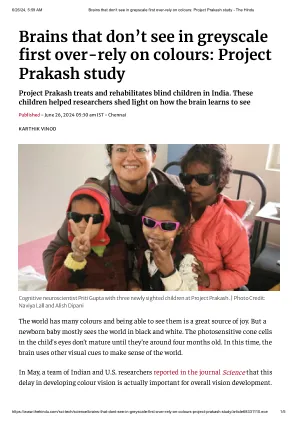
在灰度中看不到的大脑首先在颜色上过度融合
他们汇集了一群8至26岁之间的视觉障碍儿童和年轻人,并要求他们识别图像中的物体 - 一棵树,公共汽车,鸡,一堆书等。- 首先在灰度中,然后是颜色。在另一项测试中,他们要求小组确定提交给它们的两个圆盘中的哪个具有更轻的色调,而研究人员调整了颜色。
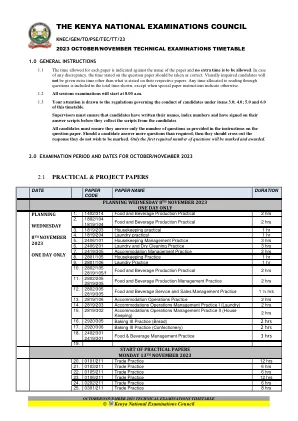
2023年10月/11月技术考试时间表
1.1每篇论文允许的时间与纸的名称表示,不允许额外的时间。在任何差异的情况下,应将回答文件上所述的时间视为正确。视觉障碍的候选人除了各自的论文中所述,不会给其他额外的时间。任何分配给阅读问题的时间都包含在所示的总时间中,除非当特殊纸张说明另有说明。
人造视觉 - Yolov8算法...
Coimbatore,泰米尔纳德邦,印度摘要:失明是一种残疾或无法看见的形式。缺乏视力仅是一个需要视线的人进行的活动,这只是一个劣势。盲人可能仅由于无法进入的基础设施和社会挑战而面临麻烦。在地方周围浏览并使用行人访问标志是盲人的最大挑战之一,尤其是视力为零的人。对于一个受到身体挑战的人来说,获得独立性可能最有价值的资产和视觉障碍的人可以在设计有必要适应的环境中过着独立的生活。本文使用Yolo(您只看一次)的实时对象检测系统,基于深度学习算法,以帮助视觉受损的人在日常生活中。cobotic眼镜是专为视障个体设计的剪边产品。使用Yolo算法无缝集成面部运动识别,对象识别和文本检测功能。Yolo使用卷积神经网络(CNN)和单个正向传播通过神经网络进行实时的对象检测。在此提议的系统中,Yolov8是一种在上下文(可可)数据集中对公共对象训练的实时对象检测算法,用于识别在对象识别中产生高准确性的人面前存在的对象。系统通过合成的语音传递输出,从而增强视觉感知。索引术语 - 视觉障碍,对象检测,Yolov8,文本,语音,CNN面部运动识别模块促进了改善的社会互动,而对象识别会提高环境意识。此集成解决方案结合了边缘处理和基于云的分析,以实时处理和计算效率。cobotic奇观使视觉障碍的个体能够提供最先进的智能眼镜系统,从而增强视觉感知,促进独立性并改善其整体生活质量。
探索内部,以查看我们针对初级,次要及以后的全部教育机器人技术!
灵活的课堂工具Cubetto培养了儿童的社交情感发展,并允许教师在学生之间进行区分,以开始小组干预,在课堂上进行情感调节,帮助小组社交互动研讨会,并作为为不同学生发展社交技能的媒介。广泛的研究表明,Cubetto在患有Send,ASD,ASD和视觉障碍的儿童的教学方面特别有效。

发展和注意力19.04.23
所有患有唐氏综合症的儿童的视力差,许多孩子也会有其他视觉障碍。任何资源都应高度对比,例如在白色背景上的黑色写作,并且写作 /笔迹应该用黑色毛毡笔。患有唐氏综合症的孩子的听力损失也更高。应定期评估视力和听力,以排除诸如耳朵感染,对眼镜的需求以及其他可能导致注意力困难的视力和听觉诊断之类的东西。
Anlotinib治疗小细胞肺癌后的后验可逆性脑病综合征:病例报告和文献综述
急症是一种口服多靶标的酪氨酸激酶抑制剂,作为中国小细胞肺癌(SCLC)患者的第三线治疗。神经毒性的报道较少。后可逆性脑病综合征(PRES)的特征是头痛,癫痫发作,脑病和视觉障碍,以及在神经图像上可见的焦距可逆血管生成性水肿。在这里,我们在与Anlotinib相关的小细胞肺癌(SCLC)患者中提出了PRES病例。一名37岁的女性患者,患有糖尿病病史,经过大量的SCLC在三线化疗后接受了急诊症。后来的十个周期,患者经历了视觉障碍,并根据脑电磁共振获得的白质的典型脱髓鞘被诊断出患有PRES。在Anlotinib治疗期间,患者没有出现抗VEGF治疗诱导的高血压。随后,患者停止了Anlotinib,但她没有从症状中恢复过来。我们还总结了文献中由抗血管生成药物引起的50例PRES病例的特征。根据我们的经验和文献综述,抗血管生成药物引起的PRES的发生率很低,并且症状可以在停止药物后解决。但是,某些情况仍然具有较差的预后,而潜在的机制需要进一步研究。此外,对PRES的早期检测和治疗对于医生至关重要。

管电压对旋转X射线阳极侵蚀的影响
本论文旨在为有视觉障碍的个体开发一个负担得起的立体视频导航系统。通过解决预算限制内的实际实施挑战,该研究旨在探索在视觉上受损的社区中使用双目摄像机在辅助技术中的可行性。立体视觉系统项目涉及对其技术和局限性的广泛研究,尤其是专注于双眼相机设置和机器学习。组装的立体声视觉设备利用开源计算机视觉库(OPENCV)进行对象识别和视频处理,启用距离计算(深度估计)。该项目具有双眼摄像机的持有人,并为用户提供了控制器形状的反馈系统。使用计算机辅助设计(CAD)软件实心边缘和三维(3D)打印的设计结合了振动电动机,以传达环境特性和障碍物接近用户。实施后,进行了实际测试,并评估了模块。项目的结果是针对双眼相机的完整设计,也是一个能够向用户提供信息的触觉反馈系统,从而使经过简单对象的导航能够。通过机器学习,该信息包括纸板箱的检测以及这些盒子的深度估计,这些盒子是根据校准和三角测量计算得出的。深度估计不会产生准确的结果,但是机器学习表现出很高的熟练程度,可以识别纸板箱。实际测试的结论表明,如果在该主题内完成了进一步的深入探索,则可以将双眼摄像机实施并发展为视觉障碍者的技术援助。