XiaoMi-AI文件搜索系统
World File Search System跟踪目标
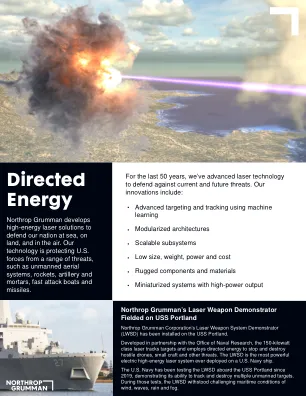
基于物联网的边境安全与自动枪支驱动......
摘要:本研究旨在设计自动化安全系统,以检测、跟踪和摧毁监视操作中的目标。该系统可以以两种模式运行,其中可以使用基于微控制器的系统自动跟踪目标。另一方面,该系统也可以手动控制,其中用户有权选择目标并在必要时进行射击。图像处理算法在 Matlab 中实现。该过程首先使用摄像机在计算机上处理视频信号,然后选择目标,然后可以使用不同的图像处理技术进一步跟踪目标。选择目标后,微控制器单元决定射击其范围内的任何未经授权的人或活动。枪安装在三脚架上,其运动由步进电机控制 关键词:微控制器、继电器、网络摄像头、执行器。
莫霍克谷社区学院 2022-2023 年度计划
衡量标准:每门所关注的课程至少包含 2 个附加部分,并将跟踪目标课程注册者的学习共享学术支持的使用情况,并将其与较大的同龄人群体的使用情况进行比较。

用于康复人机交互的 FES 循环和闭环反馈控制
摘要:对于因神经损伤而导致运动障碍的个体,功能性电刺激 (FES) 和康复机器人等康复疗法在改善其活动能力和日常生活活动方面具有巨大潜力。将 FES 与康复机器人相结合可实现紧密协调的人机交互。此类交互的一个例子是 FES 骑行,其中机动辅助可以提供高强度和重复的协调肢体运动练习,从而带来生理和功能上的好处。本文介绍了多个 FES 骑行试验台和安全装置的开发,以及自行车骑手系统的切换非线性动力学。介绍了用于节奏和扭矩跟踪的闭环 FES 骑行控制设计。对于每个跟踪目标,作者介绍并讨论了过去用于计算肌肉刺激和电机电流输入的稳健和自适应控制器的工作。针对每个控制器和跟踪目标组合,提供了涉及健全个体和神经损伤参与者的实验结果。根据实施要求、预期康复结果和骑手表现,讨论了控制算法的权衡。最后,概述了未来的工作以及所开发方法对包括遥控机器人在内的其他技术的适用性。
CellRaft AIR 系统手册
在短短六分钟内自动对整个阵列进行成像 探索获取的图像以跟踪目标细胞随时间的变化 创建细胞选择的门控策略 绘制 CellRaft 收集板以进行下游分析 按下按钮即可启动免提隔离
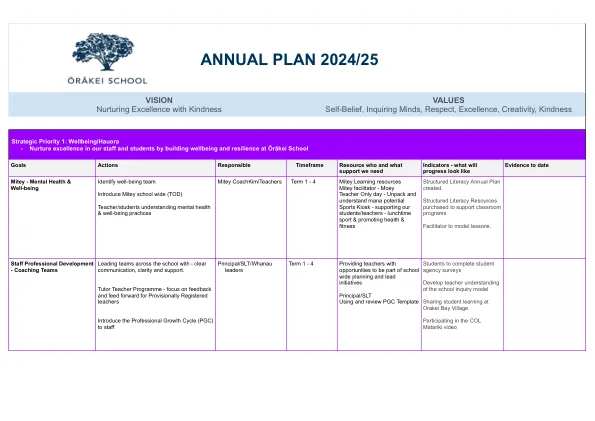
年度计划2024/25
在领导力和团队会议上查看英雄数据AP/DP,以分享对学生进步和成就的见解,创造了目标学习者的群体。跟踪目标学习者教师定期审查和更新目标的进度,以完善学习目标以及新的NZC和关键学习计划

使用并行视觉处理器实现无人机的跟踪控制
摘要 — 本文介绍了一种基于视觉的控制策略,使用一种新型视觉传感器跟踪地面目标,该传感器为每个像素元素配备一个处理器。这使得计算机视觉任务能够以高效的方式直接在焦平面上执行,而无需使用单独的通用计算机。该策略使小型、灵活的四旋翼无人机 (UAV) 能够以最少的计算工作量和低功耗从近距离跟踪目标。为了评估该系统,我们瞄准了一辆由混沌双摆轨迹驱动的车辆。目标接近度和车辆的巨大、不可预测的加速度给无人机带来了挑战,使其难以保持在向下摄像头的视野 (FoV) 内。状态观察器用于平滑对目标位置的预测,并且重要的是估计速度。实验结果还表明,在目标能见度短时间内丢失期间,可以继续重新获取和跟踪目标。跟踪算法利用视觉传感器的并行特性,在与无人机控制器出现任何通信瓶颈之前实现高速图像处理。由于视觉芯片执行最密集的视觉信息处理,因此计算机上跟踪的所有控制在计算上是微不足道的。这项工作旨在开发出节能且只在信息周围传送有用数据的视觉敏捷机器人

OBSBOT Tiny AI 驱动 PTZ 网络摄像头用户手册
OBSBOT Tiny 在 AI 网络摄像头中率先实现了手势控制,使用户能够通过自然简单的手势访问一系列功能,例如选择/取消跟踪目标、放大/缩小。无需按下按钮或中断您的流程。首先,请将您的手放在脸附近,并在做手势时保持手指张开,然后摄像头指示灯将变为蓝色。三个蓝灯一个接一个闪烁,然后全部一起闪烁一次表示您的手势已成功识别。