XiaoMi-AI文件搜索系统
World File Search System路径长度

影响飞机起飞及平稳飞行的因素分析
飞机着陆是飞行的最终阶段,飞机从 15 米的高度慢速飞行,着陆后完全停下来,然后在跑道上滑行 [4]。着陆是飞行中最困难的阶段,要求飞行员具备非常高的驾驶技能 [1]。着陆是通过减速并下降到跑道来完成的。减速是通过使用襟翼、起落架或减速板减少推力和/或产生更大阻力来实现的。飞行的起飞过程可分为两个主要阶段 - 加速和起飞。这两个阶段又由其他某些子阶段划分。航空工业的进步现已达到所有这些阶段都可以在没有飞行员参与的情况下进行的地步,即使用自动驾驶系统。在民航中,无人系统仍被谨慎使用,主要仅在水平飞行阶段使用,并且仍由机组人员控制。不过,主要是由经验丰富的飞行员执行着陆过程。由于着陆时所有动作的复杂性和危险性,根据统计,此阶段被认为是最危险的阶段 [2]。这项工作的目的是分析影响地面路径长度的因素,并开发一种系统,该系统可以在飞机着陆后完全自动停止飞机,或者至少帮助飞行员确定剩余的制动距离,以防止危险情况。开发的系统和方法将提供信息

基于脑电图源信号的疲劳驾驶定向脑网络分析
摘要:疲劳驾驶是导致交通事故的重要因素之一,长期单调的驾驶易导致驾驶员注意力与警觉性下降,表现出疲劳效应。本文提出一种基于脑电图(EEG)源信号的有向脑网络角度揭示驾驶疲劳对大脑信息处理能力影响的方法。基于源分析得到的EEG信号电流源密度(CSD)数据,采用有向传递函数构建疲劳驾驶的有向脑网络。随着驾驶时间的增加,平均聚类系数和平均路径长度逐渐增加,而大部分节律的全局效率逐渐降低,表明深度驾驶疲劳增强了大脑局部信息的整合能力,同时削弱了大脑的整体能力。此外,因果流分析发现,清醒状态和驾驶疲劳状态下的电极分布存在明显差异,主要分布在前部和后部的几个区域,尤其是在θ节律下。研究还发现,在驾驶疲劳状态下,前部区域接收后部区域信息的能力明显变差。这些发现可能为揭示驾驶疲劳的潜在神经机制提供理论基础。
第 3 章 / 晶体固体的结构 - UNC 物理学
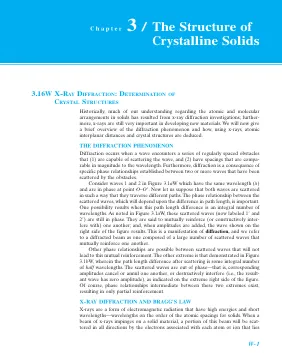
衍射现象 当波遇到一系列间距均匀的障碍物时就会发生衍射,这些障碍物 (1) 能够散射波,并且 (2) 其间距在大小上与波长相当。此外,衍射是两个或多个被障碍物散射的波之间建立特定相位关系的结果。考虑图 3.1 a W 中的波 1 和 2,它们具有相同的波长 (�) 并在点 O – O � 处同相。现在让我们假设这两个波都以某种方式散射,即它们穿过不同的路径。散射波之间的相位关系很重要,它将取决于路径长度的差异。当这个路径长度差是波长的整数倍时,就会出现一种可能性。如图 3.1 a W 所示,这些散射波(现在标记为 1 � 和 2 �)仍然同相。据说它们相互加强(或相互干扰);并且,当振幅相加时,就会产生图中右侧所示的波。这是衍射的一种表现,我们将衍射光束称为由大量相互加强的散射波组成的光束。散射波之间可能存在其他相位关系,但不会导致这种相互加强。另一个极端是图 3.1 b W 中所示的情况,其中散射后的路径长度差是半 w 的某个整数

文章基于优化的*算法
摘要:随着智能驾驶技术的快速发展,实现无人车辆的准确路径计划变得越来越重要。但是,在处理复杂且不断变化的道路状况时,路径规划算法面临挑战。在本文中,提出了基于优化的全球编程算法,旨在提高生成路径的准确性和鲁棒性,同时保持了传统A*算法的效率。首先,将惩罚函数和障碍栅格系数集成到搜索成本函数中,以增加搜索路径的适应性和方向性。其次,提出了一种有效的搜索策略来解决轨迹将通过稀疏障碍的问题,同时降低空间复杂性。第三,基于离散平滑优化的冗余节点消除策略有效地减少了控制点和路径的总长度,并大大降低了随后的轨迹优化的难度。最后,基于实际地图栅格化的仿真结果突出了路径计划的高级性能以及基准之间的比较,而拟议的策略则表明了优化的A*算法可显着提高计划中路径的安全性和合理性。值得注意的是,它将遍历节点的数量减少了84%,总转弯角度降低了39%,并在一定程度上缩短了总路径长度。

端到端的基于深度学习的路径计划和碰撞检查框架:bin选择应用程序
抽象的实时和效率路径计划对于所有机器人系统至关重要。,对于工业机器人而言,这更为重要,因为总体计划和执行时间直接影响生产线中的周期时间和自动化经济学。尽管在静态环境中问题可能并不复杂,但在计划时间和最佳性方面,经典方法在高维环境中是不可能的。碰撞检查在获得复杂环境中的路径计划的实时解决方案方面提出了另一个挑战。为了解决这些问题,我们提出了一个基于端到端的学习框架,即路径计划和碰撞检查网络(PPCNET)。PPCNET通过使用两个网络顺序计算航路点来生成路径:第一个网络生成了路点,第二个网络确定路径是否在路径的无碰撞段上。端到端培训过程基于模仿学习,该学习使用来自专家规划师的经验的数据聚合来同时培训两个网络。我们利用两种方法来训练一个有效近似确切几何碰撞检查功能的网络。最后,在两个不同的仿真环境中评估了PPCNET,并在用于BIN采摘应用程序的机器人臂上进行了实际实现。与最先进的路径规划方法相比,我们的结果通过以可比的成功率和路径长度大大减少了计划时间,显示出绩效的显着改善。

a-facile-strategy-to-dedermine-photon-flux-and效力 -
在过去的十年中,用于小分子激活的抽象光催化已经取得了显着进步,但由于光子衰减效应,其扩大量仍然是一个挑战。有希望的解决方案在于利用与连续流动反应堆技术配对的高光子强度。但是,对光子传输的深度掌握至关重要,通常需要资源密集型实验。为了解决这个问题,我们引入了一种创新的方法来用于光化学反应器设置表征,从辐射光源分析开始,然后发展为3D反应器模拟以进行光子通量测定。与确定完整光子吸收优先级的常规技术相反,当反应混合物不饱和时,我们的技术最佳地运行。该策略将光子通量和路径长度确定分解,从而大大减少了实验过程。工作流程在各种反应堆系统中都证明了多功能,将复杂的光相互作用简化为一个单维参数,即有效的光路长度。与光子通量结合在一起,该参数有效地表征了光化学设置,无论尺度,几何,光强度或光催化剂浓度如何。采用辐射测定法进一步提供了对光源定位和反应堆设计的见解,并消除了由于光源降解而导致的重复化学启动测量测量的需求。此外,提出的工作流程促进了较低浓度的实验,从而确保了最佳的反应器操作。本质上,我们的方法为反应堆照射表征提供了一个彻底,有效且一致的框架。
患有注意力缺陷多动症的大学生在空间工作记忆任务中大脑网络的动态特性
本研究使用事件相关电位 (ERP) 和空间 2-back 任务研究了患有注意力缺陷多动障碍 (ADHD) 特征的大学生的空间工作记忆缺陷。我们还使用 EEG 数据计算了感觉水平活动,并研究了 θ 和 alpha 神经振荡、锁相值 (PLV) 和大脑网络。根据成人 ADHD 自我报告量表 (ASRS) 和 Conners 成人 ADHD 评定量表 (CAARS) 的分数,选出一个 ADHD 特征组 (n = 40) 和一个正常对照组 (n = 41)。参与者需要回答呈现的刺激是否与两次试验之前呈现的刺激位于同一位置。在空间 2-back 任务中,ADHD 特征组的反应时间明显慢于对照组。在频谱方面,ADHD 特征组的 θ 功率明显低于对照组。相反,在刺激开始后的 250-1000 毫秒间隔内,ADHD 特征组与对照组相比表现出更高的 alpha 功率。在 PLV 方面,ADHD 特征组表现出的 θ 相位同步性明显弱于对照组,额枕叶区域的连接数也更少。在 θ 脑网络方面,ADHD 特征组的 θ 波段聚类系数明显低于对照组,特征路径长度明显长于对照组。本研究结果表明,具有 ADHD 特征的大学生存在空间工作记忆缺陷,而神经振荡、功能连接和网络中的这些异常活动可能导致空间工作记忆缺陷。

将改进的麻雀搜索算法应用于移动机器人的路径计划
摘要:路径计划是机器人技术领域的重要研究方向;但是,随着现代科学和技术的发展,对机器人研究领域的有效,稳定和安全的路径规划技术的研究已成为现实的需求。本文介绍了一种改进的麻雀搜索算法(ISSA),并采用了融合策略,以进一步提高解决挑战性任务的能力。首先,用圆形混沌映射初始化了麻雀种群,以增强多样性。第二,在探索阶段使用了北陀螺仪的位置更新公式,以替换安全情况下的Sparrow Search Algorithm的位置更新公式。这改善了发现者模型在解决方案空间中的搜索广度,并优化了解决问题的效率。第三,该算法采用了Lévy飞行策略来提高全球优化能力,因此在迭代的后期,麻雀会跳出本地最佳。最后,自适应T分布突变策略在后期迭代中增强了局部勘探能力,从而提高了麻雀搜索算法的收敛速度。将其应用于CEC2021函数集,并将其与其他标准智能优化算法进行比较以测试其性能。此外,ISSA是在移动机器人的路径规划问题中实施的。比较研究表明,就路径长度,运行时间,路径最佳性和稳定性而言,所提出的算法优于SSA。结果表明,在移动机器人路径计划中,所提出的方法更有效,健壮和可行。

功能性神经网络揭示注意力缺陷多动症儿童的情绪处理差异
摘要 注意力缺陷多动障碍 (ADHD) 是一种常见的神经发育障碍,除了注意力不集中、活动过度或冲动之外,还使儿童难以处理面部情绪,从而与同龄人互动。在这里,我们通过锁相值 (PLV) 方法分析了患有这种疾病的儿童的神经网络。具体来说,我们确定了 22 名健康男孩和 22 名患有 ADHD 的男孩的 62 个 EEG 通道之间的相位同步水平,同时记录了观察愤怒、快乐、中性和悲伤面部情绪。我们基于伽马子带构建了神经网络,根据以前的研究,该子带对情绪刺激的反应最高。我们发现 ADHD 组的额叶和枕叶的功能连接显著 ( P 值 \ 0.01) 高于健康组。这些脑叶的功能连接越多,表明这些脑区神经元之间的相位同步性越高,这说明 ADHD 组大脑情绪处理中心存在一些问题。ADHD 组这些脑叶的最短路径长度也显著高于健康组(P 值 \ 0.01)。这一结果表明 ADHD 神经元网络的枕叶和额叶(分别负责大脑中的视觉和情绪处理)中信息传递和分离的效率较低。我们希望我们的方法能够帮助利用网络科学方法进一步深入了解 ADHD。

Neurosurgical-焦点
目的本研究的目的是评估增强现实手术导航(ARSN)系统的准确性(与目标或预期路径的偏差)和功效(插入时间),以插入活检针和外部心室排水(EVD)(EVD),两个常见的神经外科手术,需要高度的神经外科手术。使用了基于混合手术室的ARSN系统,其中包括具有术中圆锥形圆锥形CT(CBCT)的机器人C臂(CBCT)以及使用非引人注目的粘合剂光学标记的患者和仪器的集成视频跟踪。获得了一个3D打印的头骨幻影,具有逼真的凝胶脑模型,其中含有空气室和2毫米球形活检靶标。最初的CBCT获取目标注册和计划后,ARSN用于30次颅骨活检和10个EVD插入。通过CBCT验证针头位置。结果活检针插入(n = 30)的平均准确性为0.8 mm±0.43 mm。中值路径长度为39毫米(范围16–104 mm),与精度无关(p = 0.15)。中间设备插入时间为149秒(范围87-233秒)。与计划的路径相比,EVD插入(n = 10)的平均插入(n = 10)为2.9 mm±0.8 mm,角度偏差为0.7°±0.5°,中间插入时间为188秒(范围135-400秒)。结论这项研究表明,ARSN可用于以很高的准确性和功效为导航经皮颅骨活检和EVD。