XiaoMi-AI文件搜索系统
World File Search System轨迹跟踪

基于扩展状态观察者和后台控制的轨迹跟踪控制类似汽车的移动机器人的控制
摘要:在本文中,提出了一种基于扩展状态观察者(ESO)(ESO)的低速汽车移动机器人(CLMR)的轨迹跟踪控制策略,并提出了后台控制控制,以解决轨迹跟踪的问题问题,该问题是由模拟错误和外部干扰物引起的轨迹跟踪准确性降解。首先,将建模误差和外部干扰引入了CLMR的理想运动学模型中,并利用一组输出方程将耦合的,不向导的干扰运动学模型拆分为两个相互独立的子系统。接下来,基于线性ESO估算子系统中的干扰,并通过Lyapunov方法证明了所提出的观察者的收敛性。最后,使用后备控制控制器设计具有干扰补偿的控制器,以完成CLMR的轨迹跟踪任务。仿真和实验结果显示了拟议的控制方案的有效性。

在存在运动和动态干扰的情况下,自适应双环轨迹跟踪船舶表面车辆的控制
本文介绍了针对海洋表面车辆(MSV)的双环自适应轨迹跟踪控制系统,该系统既解决运动学和动态干扰。该方法始于外环的后台控制策略,该策略在运动级别生成速度命令,以确保对MSV的位置和标题进行准确跟踪。一个自适应估计器已整合以评估未知的海洋电流速度,从而有效地补偿了其影响。内环控件采用线性参数化来在动态级别产生扭矩命令,从而确保实际速度和指挥速度状态之间的对齐。提出了两种自适应调整定律:一个用于估算具有挑战性的水动力参数,另一个用于补偿外部海洋干扰。双环控制可显着减轻运动学和动态干扰的影响,从而提高了MSV跟踪的精度和整体性能。稳定性,并得出了系统未知参数的适应定律。数值模拟证明了拟议的控制策略的功效。
基于差分平面度的一类 3D 空中机械手的 6D 位姿任务轨迹跟踪
I. 引言 A. 背景与动机 近年来,空中操控引起了机器人研究界的极大兴趣 [1]。多个研究小组展示了使用安装在空中机械手上的夹持器进行空中抓取 [2]–[4]。Lee 和 Kim、Kim 等人展示了协作式空中机械手在有障碍物的环境中抓取未知有效载荷 [5],[6]。Orsag 等人演示了使用四旋翼平台和安装在平台上的双臂执行拾取和钉孔任务 [7]。欧盟第七框架计划资助了几个空中机械手项目,研究空中机械手与环境交互时的运动规划和阻抗控制 [8]–[10]。德国航空航天中心的一个研究小组介绍了安装在直升机上的 7 自由度人形手臂的潜在应用 [11]。类似 Delta 的机构 [12] 和并联机械手 [13] 也被考虑用于空中机械手。这些现有的研究为空中操纵的研究提供了广阔的未来。然而,与地面操纵器相比,空中操纵器能够完成的任务仍处于非常初级的阶段。这是由于许多因素造成的,例如
3D打印机软件机器人的垂直尖端轨迹跟踪:启用手术血液吸力自动化
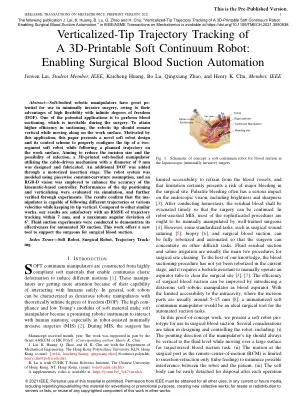
摘要 - 富有的机器人操纵器在微创手术中非常有用,这是由于它们具有高度灵活性的优势,并具有无限的自由度(DOF)。潜在的应用之一是进行吸血,这在手术过程中是不可避免的。为了在吸力方面提高效率,机器人尖端应保持垂直,同时沿工作表面移动。是出于本应用的激励,本文提出了一种新颖的软机器人设计及其控制方案,以正确配置两段软机器人的尖端,同时遵循工作表面上的计划轨迹。旨在减少切口尺寸和感染的可能性,设计和制造了直径为9毫米的电缆驱动机构的3D打印的柔软的操纵器。通过电动插入阶段添加了额外的DOF。使用分段恒定曲率假设对机器人系统进行建模,并采用RGB-D视觉来增强基于运动学的控制器的准确性。通过模拟评估了尖端定位和垂直化的性能,并通过实验进一步验证。结果证实了Ma-nipulator能够在各种速度下遵循不同轨迹的同时保持其尖端垂直。与其他类似的作品相比,我们的结果是在7 mm以内的轨迹跟踪RMSE和6°的最大角度偏差之内令人满意的。流体吸力实验,以证明其自动3D吸力的有效性。这项工作提供了一种新工具,可以支持外科医生进行手术吸血。

通过手段控制自动摩托车
自动摩托车是一种双轮的车辆,可以在不干预的情况下移动。它使用传感器,相机和算法的组合来检测其环境并决定如何移动。本文显示了使用模糊逻辑对自动摩托车控制的比较,而LQR计数器控制器内置了MATLAB,并在带有微控制器的嵌入式系统中实现。执行了为此目的构建的原型的轨迹跟踪和平衡稳定。可以确定LQR控制如何在稳定中以角度变化表示的脉冲响应前面的模糊逻辑控制前面具有良好的行为。关键字:自动摩托车,轨迹跟踪,平衡稳定,模糊逻辑,LQR 1。简介

集成路径以下和分布式驱动器自动驾驶无人车辆的横向稳定性控制
摘要:智能化是未来汽车行业的发展趋势。智能设备要求车辆的动态控制可以根据决策计划的轨迹输出来完成轨迹跟踪,并确保车辆的驾驶安全性和稳定性。但是,紧急情况引起的轨迹限制规划和严格的道路条件将增加轨迹跟踪和无人车辆稳定控制的困难。鉴于上述问题,本文研究了分布式驱动器无人车辆的轨迹跟踪和稳定性控制。本文应用了分层控制框架。首先,在上部控制器中,提出了算法后的自适应预测时间线性二次调节器(APT LQR)路径,以考虑轮胎的动态稳定性性能,以获取所需的前轮驱动角度。DDAUV的横向稳定性是基于相位平面确定的,在改进的滑动模式控制(SMC)中,滑动表面进行进一步调节,以获得所需的额外偏航矩,以协调路径后跟随和横向稳定性。然后,在下部控制器中,考虑到四个轮胎的滑动和工作负载,建立了全面的成本功能,以合理地分配四个轮毂电动机(IWM)的驾驶扭矩,以生成所需的额外偏航矩。最后,建议的控制算法通过硬件(HIL)实验平台验证。结果显示了以下路径,并且在不同的驾驶条件下可以有效地协调横向稳定性。

基于扩展状态观测器的 U 模型增强双滑模控制的四旋翼飞行器轨迹跟踪
本文基于多输入多输出扩展状态观测器 (MIMO-ESO),为四旋翼飞行器开发了一种新型 U 模型增强型双滑模控制器 (UDSMC)。UDSMC 采用 Lyapunov 合成和 Hurwitz 稳定性设计,不仅可以消除复杂的动力学和非线性,还可以稳定底层四旋翼飞行器的不确定性和外部干扰。MIMO-ESO 旨在估计不可测量的速度,从而可以减少传感器测量误差在实践中的影响。该控制设计成功解决了与四旋翼飞行器速度测量干扰和不确定的空气动力学相关的困难。进行了严格的理论分析,以确定所提出的控制系统是否能够实现稳定的轨迹跟踪性能,并进行了实时比较实验研究,以验证所提出的控制系统比内置 PID 控制系统更有效。© 2022 作者。由 Elsevier Ltd 代表富兰克林研究所出版。这是一篇根据 CC BY 许可协议开放获取的文章 ( http://creativecommons.org/licenses/by/4.0/ )


使用高斯潜在功能的修改后方程式开发避免障碍控制系统
摘要 - 行驶系统是自动驾驶汽车的必要系统,许多论文提出了轨迹跟踪和避免障碍物的技术。高斯潜在功能对于使用2D激光雷达避免障碍物的轨迹跟踪控制系统众所周知。缺点是它依赖于局部最小值,在某些情况下,车辆和目标正在朝着相同的方向移动,由于有吸引力的潜在领域的诱惑太高,因此车辆和目标正在朝着相同的方向移动。然后,已经引入了使用修改后的有吸引力功能避免障碍物的轨迹跟踪控制,该功能的常规吸引力功能被修改以改善导航系统。模拟是通过Carla模拟器进行的,并且使用修改功能的避免障碍物的运动在跟踪过程中的摇摆运动和横向运动过程中的安全性考虑,这是通过车辆的横向加速度来考虑的,其在模拟情况下的值比其他类型的有吸引力的功能少。同时,修改后的功能还保持了车辆和障碍物之间的安全距离差距,以免避免在障碍物范围内避免在非常接近的范围内,这可能会导致碰撞。关键字 - 三射跟踪控制系统,避免障碍物,高斯潜在功能,有吸引力的功能,Carla Simulator

Radhe Shyam Sharma - 教职人员
4. Radhe Shyam Sharma、Santosh Shukla、Hamad Karki、Amit Shukla、Laxmidhar Behera 和 Venkatesh KS,“基于 DMP 的非完整移动机器人轨迹跟踪与自动目标适应和避障”,IEEE 国际机器人与自动化会议 (ICRA),第 8613-8619 页,2019 年。PDF 实验视频