XiaoMi-AI文件搜索系统
World File Search System轨迹跟踪

简历
11- Ahmed J. Abougarair,“基于纹理特征的道路边界分割”,Azzaytuna 大学期刊,2016 年。12- Ahmed J. Abougarair,“使用组合两级控制器的移动机器人轨迹跟踪”,Azzaytuna 大学期刊,第 2 卷,第 23 期,第 21-41 页,2017 年。13- Ahmed J. Abogarair,“在 MATLAB/SIMULINK 下使用动态规划算法技术设计 PID 控制器应用于真实工厂”,IRES 第 135 届国际会议,2018 年,俄罗斯莫斯科。14- Ahmed J. Aboguarair,“主动悬架系统线性模型的智能控制设计”,第 30 届国际微电子会议(IEEE),2018 年,突尼斯。

系统级别的安全护罩:通过不确定的神经网络动态模型
摘要在许多对照和机器人应用程序中都考虑了神经网络(NN)作为黑框函数近似器。但是,在不确定性存在下验证整体系统安全的困难阻碍了NN模块在安全至关重要的系统中的部署。在本文中,我们利用NNS作为未知染色体系统轨迹跟踪的预测模型。我们在存在固有的不确定性和其他系统模块的不确定性的情况下考虑控制器设计。在这种情况下,我们制定了受约束的传播跟踪问题,并表明可以使用混合智能线性程序(MILP)对其进行求解。在机器人导航和通过模拟避免障碍物中,基于MILP的方法在经验上得到了证明。演示视频可在https://xiaolisean.github.io/publication/2023-11-01-L4DC2024获得。关键字:神经网络,系统级安全,不确定性,轨迹跟踪

在线轨迹重新启动器,用于动态抓住不规则对象
摘要 - 本文提出了一种用于抓住不规则对象的新轨迹重新启动器。与常规的掌握任务不同,该任务简单地假定对象的几何形状,我们旨在实现不规则对象的“动态掌握”,这需要在握把过程中持续调整。为了有效处理不规则的对象,我们提出了一个构成两个阶段的轨迹优化框架。首先,在指定的时间限制为10 s的指定时间限制中,为从机器人的初始配置中进行无缝运动计算初始离线轨迹,以掌握对象并将其传递到预定义的目标位置。其次,实现了快速的在线轨迹优化,以在100毫秒内实时更新机器人轨迹。这有助于减轻视力系统中的估计错误。为了解释模型的不准确性,干扰和其他非模块化效果,实施了机器人和抓手的轨迹跟踪控制器,以从提出的框架中阐明最佳轨迹。密集的实验结果有效地证明了我们在模拟和现实世界中的轨迹计划框架的性能。

用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
传感器 - 语义学者
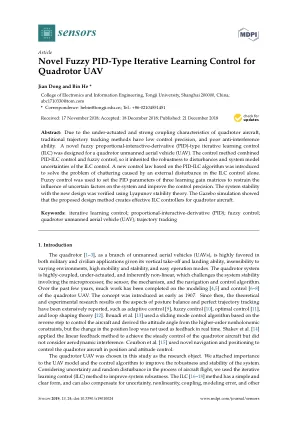
摘要:由于四旋翼飞行器具有欠驱动、强耦合等特点,传统的轨迹跟踪方法控制精度低,抗干扰能力差。针对四旋翼无人机,设计了一种新的模糊比例-交互式微分(PID)型迭代学习控制(ILC)。该控制方法将PID-ILC控制与模糊控制相结合,继承了ILC控制对干扰和系统模型不确定性的鲁棒性。针对单纯的ILC控制容易受到外界干扰而产生抖动的问题,提出了一种基于PID-ILC算法的新型控制律。采用模糊控制对三个学习增益矩阵的PID参数进行设置,以抑制不确定因素对系统的影响,提高控制精度。利用Lyapunov稳定性理论验证了新设计的系统稳定性。Gazebo仿真表明,所提出的设计方法为四旋翼飞行器设计了有效的ILC控制器。
用于飞机轨迹跟踪的不完全状态观测的系统识别和 LQR 控制器设计
摘要:本文介绍了一种当并非所有状态都可用时,针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
自适应控制的未来-Iris Publishers
这项研究提出了一个基于深度强化学习(DRL)的智能自适应控制框架。动态干扰场景下的比较实验表明,与传统的模型参考自适应控制(MRAC)相比,提出的框架将系统稳定时间降低了42%(*P*<0.01),并将控制精度提高1.8个数量级(RMSE:0.08 vs. 1.45)。通过将物理信息的神经网络(PINN)与元强化学习(Meta-RL)整合在一起,混合体系结构解决了常规方法的关键局限性,例如强大的模型依赖性和实时性能不足。在工业机器人臂轨迹跟踪和智能电网频率调节方案中得到验证,该方法的表现优于关键指标的传统方法(平均改进> 35%)。用于边缘计算的轻量级部署方案可在嵌入式设备上实现实时响应(<5ms),为复杂动态系统的智能控制提供了理论和技术基础。