XiaoMi-AI文件搜索系统
World File Search System飞机系统

飞机系统线路可修复单元 (LRU) 的最佳维护决策 - 概念方法
LRU 的故障率和维修率以及机队中飞机的报废率。在役 LRU 数量增加率 =(从飞机接收的在役 LRU + LRU 的维修率 - LRU 的故障率 - 从报废飞机维修的 LRU)
UCAA-AC-GEN014B-EFB 咨询通告
便携式 EFB 可以有线或无线方式与飞机系统建立数据连接,前提是连接(用于数据连接规定的硬件和软件)和足够的接口保护设备已纳入飞机类型设计中。便携式 EFB 可以接收来自飞机系统的任何数据,但 EFB 的数据传输应仅限于已通过此预期用途认证的飞机系统(有关更多详细信息,请参阅 EASA AMC-25A 第 5.1.1.3 段,其中包括有关便携式 EFB 连接规定的详细信息,即当 EFB 从飞机系统接收任何数据时,应仅限于设定的条件)

航空电子领域的系统测试
过去,飞机系统由(很大程度上)独立的控制元件以及相关的执行器和传感器组成,每个元件都是针对系统中的特定任务而开发的。为了能够满足新飞机开发中增加的要求和扩大的功能范围,现代飞机系统基于集成模块化电子架构框架,该框架允许组合不同的组件: -关键区域可以使用非为航空工业开发的现有组件;集成模块化航空电子设备 (IMA) 技术用于安全关键的飞机功能。为了保持 IMA 架构的模块化、开放性和灵活性,它基于共享的标准化平台(IMA 模块)和标准化网络技术,这两者都是专门针对航空电子的要求而设计的 – 但是独立于特定飞机系统中的任务。对于相应的飞机系统,这意味着以前特定于任务的控制元件将被与其他系统共享的 IMA 模块所取代。由于这些变化也会对整个开发和测试流程产生影响,因此必须定义新流程并开发合适的方法和工具。
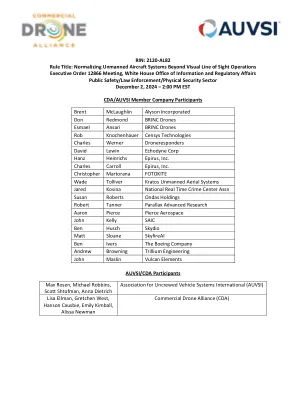
RIN:2120-AL82规则标题:将无人飞机系统正常于视觉行动行动命令12866会议,白宫OffRIN:2120-AL82规则标题:将无人飞机系统正常于视觉行动行动命令12866会议,白宫Off
•基于风险的方法:ARC建议采用基于风险的BVLOS操作框架,其中风险水平将决定运营条件和要求。公共安全机构通常在受控或低风险环境(例如农村或灾难地区)运作,只要管理风险,就可以从更灵活和量身定制的BVLOS运营中受益。•安全管理系统(SMS):ARC建议采用BVLOS无人机操作的公共安全机构实施SMS。该系统将帮助机构识别,评估和减轻安全风险,以确保以安全的方式进行操作。•地理围栏和其他安全特征:建议在公共安全场景中运行BVLOS的无人机结合了高级技术,例如地理围栏,以防止意外的空域入侵并保护敏感地区,例如医院或受限区域。


低成本遥控飞机系统 (RPAS) 配备多光谱传感器,用于绘制和分类潮间带生物牡蛎礁
用于低空遥感的 RPAS 技术和用于增强成像的微型传感器的蓬勃发展,导致了海洋生态应用的增加。然而,带有可见电磁波谱传感器的 RPAS 的普遍性可能会限制沿温带潮间带岩礁的生物海洋栖息地的精细测绘、监测和识别应用。在这里,我们使用低成本的 RPAS 结合多光谱传感器 (MicaSense® RedEdge™) 和基于对象的图像分析 (OBIA) 工作流程,在新西兰奥克兰怀特玛塔港制作了生物牡蛎礁的超高分辨率地图。结果表明,具有可见电磁波谱以外的光谱带逐渐增强了图像上的特征检测,并增加了在异质海洋生态系统中描绘目标特征的潜力。使用基于规则的分类技术提取目标特征,基于分割后的光谱特征,总体准确率为 83.9%,kappa 系数为 69.8%。使用附加光谱带可提高牡蛎礁栖息地测绘的光谱分辨率。高空间尺度监测和测绘浑浊的潮间带岩石礁带来了独特的挑战,但这些挑战可以通过在理想的气象和海洋条件下使用 RPAS 进行瞄准飞行来缓解。

回顾 2014 年至 2017 年为支持加拿大皇家空军遥控飞机系统项目而进行的人为因素研究
摘要:遥控飞机系统 (RPAS) 是军事组织用来帮助人类脱离危险境地并允许在严酷和不适宜的环境中作业的工具。为了支持根据加拿大“强大、安全、参与 2017”国防政策采购 RPAS 机队,加拿大皇家空军 (RCAF) 在 RCAF 联合无人监视和目标获取系统项目(随后由 RCAF RPAS 项目取代)下资助了加拿大国防研究与发展局 - 多伦多研究中心,对与地面控制站 (GCS) 机组人员控制 RPAS 的表现有关的人为因素 (HF) 问题进行了初步调查。本文回顾了 2014 年至 2017 年期间进行的加拿大皇家空军研究计划,该计划讨论了 RPAS 操作中的 HF 问题以及培训如何与决策、技能和知识以及任务准备的 HF 属性相关联。此外,本文还介绍了一种培训需求分析方法和分析,确定了 RPAS 机组人员的基本能力(表示为每个机组人员执行各自任务所需的知识、技能和能力)。最后,本文讨论了研究实验和评估能力以支持 RPAS 操作员培训和 GCS 适航认证的工作。
低成本遥控飞机系统 (RPAS) 配备多光谱传感器,用于绘制和分类潮间带生物牡蛎礁
低空遥感用 RPAS 技术和增强成像用微型传感器的蓬勃发展,推动了海洋生态应用的增加。然而,可见电磁波谱中传感器的 RPAS 的普遍性可能会限制沿温带潮间带岩礁的生物海洋栖息地的精细测绘、监测和识别应用。在这里,我们使用低成本 RPAS 结合多光谱传感器 (MicaSense® RedEdge™) 和基于对象的图像分析 (OBIA) 工作流程,在新西兰奥克兰怀特玛塔港制作生物牡蛎礁的超高分辨率地图。结果表明,可见电磁波谱以外的光谱带逐渐增强了图像上的特征检测,并增加了在异质海洋生态系统中描绘目标特征的潜力。使用基于规则的分类技术提取目标特征,基于分割后的光谱特征,总体准确率为 83.9%,kappa 系数为 69.8%。使用附加光谱带可提高牡蛎礁栖息地测绘的光谱分辨率。高空间尺度监测和测绘浑浊的潮间带岩礁带来了独特的挑战,但这些挑战可以通过在理想的气象和海洋条件下使用 RPAS 进行目标飞行来缓解。
海军航空兵适航和网络安全流程...
第 1 章 — — 目的、权限和背景 1. 目的 a. 制定详细的政策、职责和程序,以执行适航性和 CYBERSAFE 审查,从而获得海军航空系统司令部 (NAVAIR) 的飞行许可和/或所有海军部 (DON) 公共飞机运营 (PAO) 的 CYBERSAFE 认证,如参考文献 (a) 至 (e)。 b. 本手册适用于所有 DON 飞机和所有进行 DON PAO 的飞机,包括由任何 DON 实体或部门拥有、租赁、运营、使用、设计或改装的飞行器和飞机系统,无论它们是否反映在美国海军和/或美国海军陆战队 (USMC) 的官方库存中,也无论其作战区域如何,包括但不限于: (1) 所有有人驾驶和无人驾驶飞行器和飞机系统,包括预先验收的飞机。示例包括但不限于;所有现役和开发中的飞行器和飞机系统,包括为海军部使用的联合项目办公室系统、为海军部使用的负责研究、发展和采购的海军助理部长指定的所有航空采购项目,以及拥有、操作或管理海军部飞行器和飞机系统的舰队单位。 (2) 标准和非标准配置的有人驾驶和无人驾驶飞行器和飞机系统,包括硬件、固件、软件、飞行包线和操作。示例包括但不限于:外挂物和外挂悬挂设备、航空生命保障系统 (ALSS) 利用以及无人机系统 (UAS) 的机载和地面组件。 (3) 开发测试 (DT)、作战测试 (OT)、后续作战测试和评估 (FOT&E) 和舰队作战。本指令不会取代或优先于适用采购指令要求的 DT、OT 准备就绪正式认证流程或 FOT&E 重新认证流程。
欧洲无人机展望研究 - SESAR 联合承诺
SESAR 联合行动已经对“无人机”的使用提出了见解,无人机是指无人驾驶飞机系统 (UAS) 或无人驾驶飞行器 (UAV);这包括遥控飞机系统 (RPAS),作为其子集。无人机系统 (UAS) 的机载组件是无人驾驶飞行器 (UAV),包括两种基本类型:遥控飞机系统 (RPAS),这是一种由“飞行员”从地面控制站 (GCS) 操作遥控飞机 (RPA) 的 UAS;以及没有遥控飞行员的 UAS,或自主飞行器。在本文件中,术语“无人机”本质上是一个外行术语,是指所有类型的 UAS。此预测延伸至 2050 年,因此包括许多带有不确定性的假设。由于固有的不确定性,所有数字均已四舍五入,应按其数量级进行解释。此外,该预测是作为欧洲在该主题上的起点而制定的,预计不会详尽涵盖所有潜在形式的无人机。特别关注了无人机在欧洲天空中的运行,因此,没有预测用于工业和住宅设施内的任务和无人机类型。此外,所有货币数字都是名义上的,不包括通货膨胀影响的调整。本报告中显示的所有经济指标和无人机单位总数均反映了欧洲需求