XiaoMi-AI文件搜索系统
World File Search System龙骨

现代龙骨下间隙管理
本文概述了最近的技术发展,这些技术提高了管理港口龙骨下间隙 (UKC) 的能力。大吃水船舶进入或离开深度受限港口时,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。但是,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及特定于船舶的航道动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关洋流、水密度和波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:现在预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进才能使有效的 UKC 管理成为现实。
现代龙骨下间隙管理
本文概述了最近改进港口龙骨下净空 (UKC) 管理能力的技术发展。如果大吃水船舶进出深度受限的港口时不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。但是,要做到这一点,船长必须拥有沿航线的准确实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度和波浪、涌浪和/或围海的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
奶牛场自然公园的斑点龙骨背
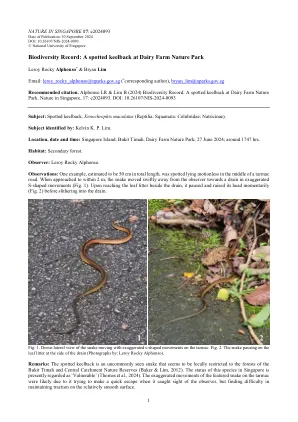
新加坡的大自然17:e2024093出版日期:2024年9月30日doi:10.26107/nis-2024-0093©新加坡大学新加坡大学生物多样性记录记录:在奶牛场斑点的基尔巴克(Keelback)作者),bryan_lim@nparks.gov.sg推荐引用。Alphonso LR&Lim B(2024)生物多样性记录:奶牛场自然公园的斑点龙骨背。新加坡的自然,17:e2024093。doi:10.26107/nis-2024-0093主题:斑点龙骨背,Xenochrophis maculatus(Reptilia:squamata:squamata:colubridae:natricinae)。主题:Kelvin K. P. Lim。位置,日期和时间:新加坡岛,武吉塔马,奶牛场自然公园; 2024年6月27日;大约在1747年左右。栖息地:次生森林。观察者:Leroy Rocky Alphonso。观察:一个例子,估计在总长度上为50厘米,在柏油路路中间一动不动。在2 m以内接近时,蛇在夸张的S形运动中迅速从观察者移动到排水沟(图。1)。到达排水管旁边的叶子时,它暂时暂停并抬起头(图。2)在滑入排水口之前。
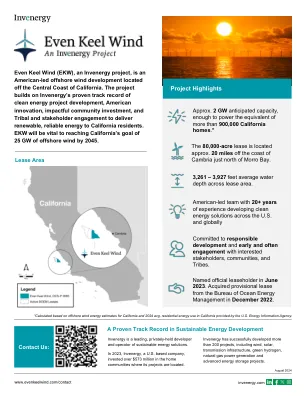
平衡龙骨风电 (EKW) 是 Invenergy 的一个项目,
EKW 将在整个项目生命周期内使用最新技术和环境安全协议。Invenergy 的环境合规和战略团队积极参与识别和推进创新技术的努力,例如被动声学监测系统、自动视觉系统和海洋条件预报工具,以与行业合作伙伴合作加强缓解和监测计划。这些工具和系统将继续加强 Even Keel Wind 在环境监测和负责任的开发实践方面的领导地位。

实施再工程技术以...
本研究的主题是飞机物体部件(AO)及其制造技术设备的再工程设计和控制技术。通过使用再工程技术和 CAD 系统,确保了轻型飞机龙骨及其制造技术设备成型表面的预定义精度。使用软件 Artec Studio(美国)以 *.stl 文件格式构建了轻型飞机实际存在的龙骨肖像。基于其肖像,对分析标准形状的几何形状与轻型飞机实际存在的龙骨进行了控制和比较。所用方法是形状实验几何形状的分析和综合、专家评估方法。获得以下结果:基于分析和综合,检测到轻型飞机龙骨制造精度存在显著误差,范围从 - 5.26 毫米到 +5.39 毫米。结果表明,关键因素是龙骨的相对平面度指标,该指标超出公差范围,为 85%。决定用另一种材料——有机塑料制造新的工艺设备。对轻型飞机龙骨用有机塑料制造的工艺设备进行控制,结果表明,该设备的成型表面具有与现有龙骨形状和尺寸相符的适当形状和尺寸。

SECNAVINST 5031.1E ASN (RD&A) 2024 年 3 月 14 日 SECNAV ...
SECNAVINST 5031.1E ASN(RD&A)2024 年 3 月 14 日 SECNAV 指令 5031.1E 来自:海军部长 主题:舰船命名、赞助商选择、舰徽开发、龙骨铺设、命名、调试和退役 参考:(a) SECNAV M-7000.1 (b) 2022 年 6 月联合旅行条例 (c) DoD 5500.07-R,联合道德条例,2011 年 11 月 (d) SECNAVINST 4001.2K (e) SECNAV M-5210.1 (f) NAVPERS 15665I (g) SECNAV 5870.7A (h) NAVSUP 出版物 486,第 II 卷,修订2016 年 8 月 8 日,第 3 章 (i) OPNAVINST 4770.5J (j) 10 USC §8766 (k) SECNAV M-5214.1 附件: (1) 与船舶命名、赞助商选择、徽章开发、安放龙骨、命名、调试和退役相关的标准操作程序 (2) 船舶命名流程和程序 (3) 赞助商选择和支持 (4) 船舶徽章开发 (5) 安放龙骨仪式 (6) 命名仪式 (7) 调试仪式 (8) 退役仪式 1. 目的。定义流程并确定计划和执行主要船舶里程碑和仪式(包括船舶命名、赞助商选择、徽章开发、安放龙骨、命名、调试和退役)的角色和职责。参考文献中的指导
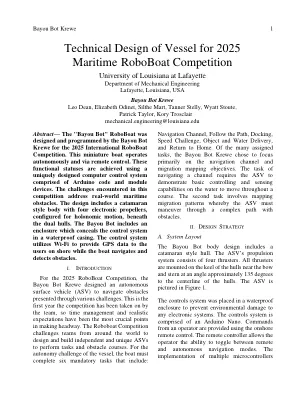
2025年海事Roboboat的船只技术设计...
ASV的框架基于一对泡沫填充的玻璃纤维壳,如图2所示,与形成浮桥相连。这种设计允许轻巧但浮力的船体,即使玻璃纤维壳受损,它们也可以保持正浮力。ASV配备了四个蓝色机器人T-200推进器,从策略上安装的角度约为135度,相对于船体中心线。将其位于弓箭附近的每个浮桥龙骨的龙骨上,该配置提供了自动运动,从而允许ASV精确有效的可操作性。ASV的推进器通过动态调整其旋转方向和速度来实现纵向,横向和旋转运动,提供精确且通用的可操作性,如图3所示。