机构名称:
¥ 1.0
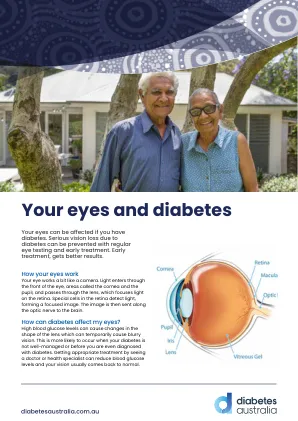
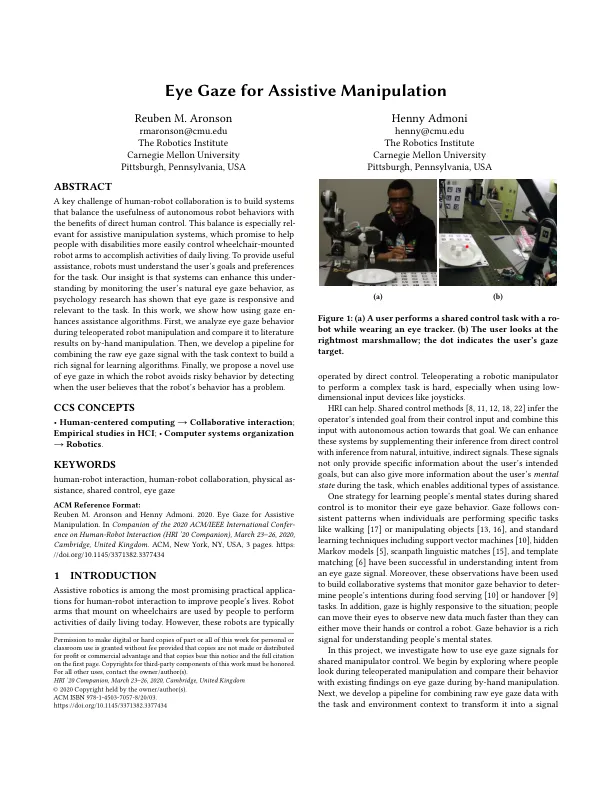
人机协作的一个关键挑战是构建一个系统,平衡自主机器人行为的实用性和直接人类控制的好处。这种平衡对于辅助操作系统尤其重要,辅助操作系统有望帮助残疾人更轻松地控制安装在轮椅上的机械臂来完成日常生活活动。为了提供有用的帮助,机器人必须了解用户的目标和任务偏好。我们的见解是,系统可以通过监控用户的自然目光注视行为来增强这种理解,因为心理学研究表明,目光注视对任务具有响应性且相关。在这项工作中,我们展示了如何使用目光注视来增强辅助算法。首先,我们分析遥控机器人操作过程中的目光注视行为,并将其与文献中关于手工操作的结果进行比较。然后,我们开发了一个管道,将原始目光注视信号与任务上下文相结合,为学习算法构建丰富的信号。最后,我们提出了一种新颖的目光注视用法,即机器人通过检测用户何时认为机器人的行为有问题来避免危险行为。
眼睛注视辅助操作
主要关键词

相关文件推荐