机构名称:
¥ 15.0
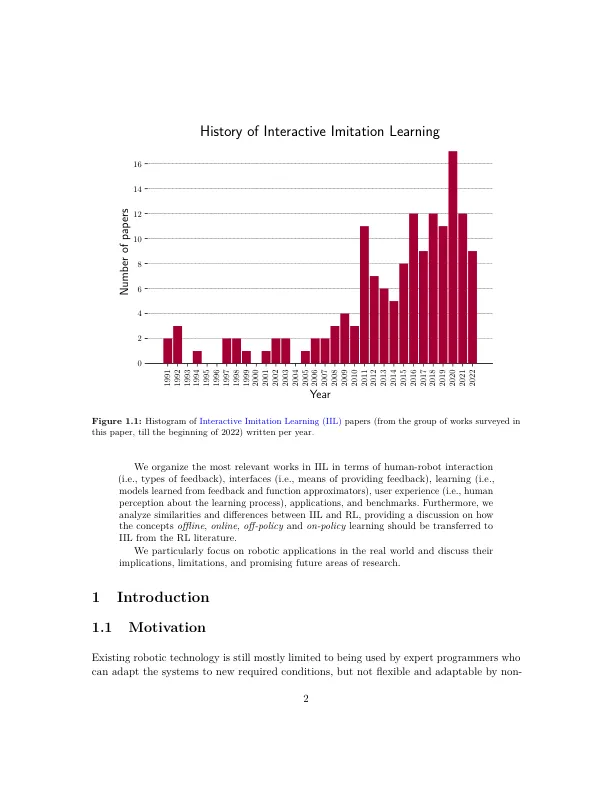
交互式模仿学习(IIL)是模仿学习(IL)的一个分支,在机器人执行过程中,间歇性地提供了人类反馈,从而可以在线改善机器人的行为。近年来,IIL越来越开始开拓自己的空间,作为解决复杂机器人任务的有前途的数据驱动替代方案。IIL的优势是双重的,1)它是有效的,因为人类的反馈将机器人直接引导到了改善行为(与增强学习(RL)相反(RL),必须通过试用和错误发现行为(必须通过试用和错误发现),而2),并且2)是强大的,因为它是强大的,因为分配者和教师的分配量直接在教师身上是匹配的,并且在教师中匹配的范围是在范围内逐渐匹配的,并且在教师中匹配的范围是在范围内的指导,而逐渐匹配的是,教师的自我反射是及格的, o line Ile IL方法,例如行为克隆)。尽管有机会,但文献中的术语,结构和适用性尚不清楚,也尚未确定,从而减慢了其发展,因此,研究了创新的表述和发现。在本文中,我们试图通过对统一和结构的领域进行调查来促进新从业人员的IIL研究和较低的入境障碍。此外,我们旨在提高人们对其潜力,已完成的工作以及仍在开放的研究问题的认识。
模仿机器人学:调查 - 虹膜
主要关键词




相关文件推荐