机构名称:
¥ 1.0
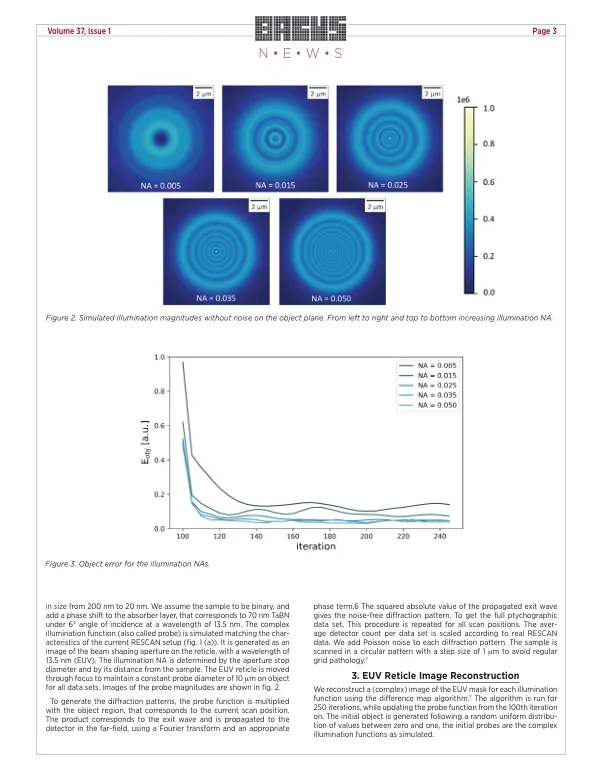
在每次迭代时,将重建对象 ^ o的绝对值与样本布局中的参考对象o进行比较。误差归一化为像素的总数。所有NAS的对象误差如图2所示。3。在探针更新启动后,在第100次迭代开始时,对于所有照明NAS,错误正在迅速衰减至稳定的水平。在该水平周围的波动,最适合下NA曲线可见,是差图算法所固有的,该算法通常达到接近最佳解决方案的稳态。7要找到最佳的图像重建,可以平均使用最后几个迭代的解决方案,或使用另一种算法(例如,从PIE-FAMILY 9)进行更多迭代,该算法更有可能收敛到全球迷你妈妈。我们观察到两个最小的NAS的较大对象误差,以及最大的三个照明NAS的较小对象误差。最大的NA(naillum = 0:050)观察到最低误差。从图。3,我们观察到较低的物体误差的趋势,因此具有较大的照明Na的样品重建更准确。
photoMask
主要关键词