机构名称:
¥ 1.0
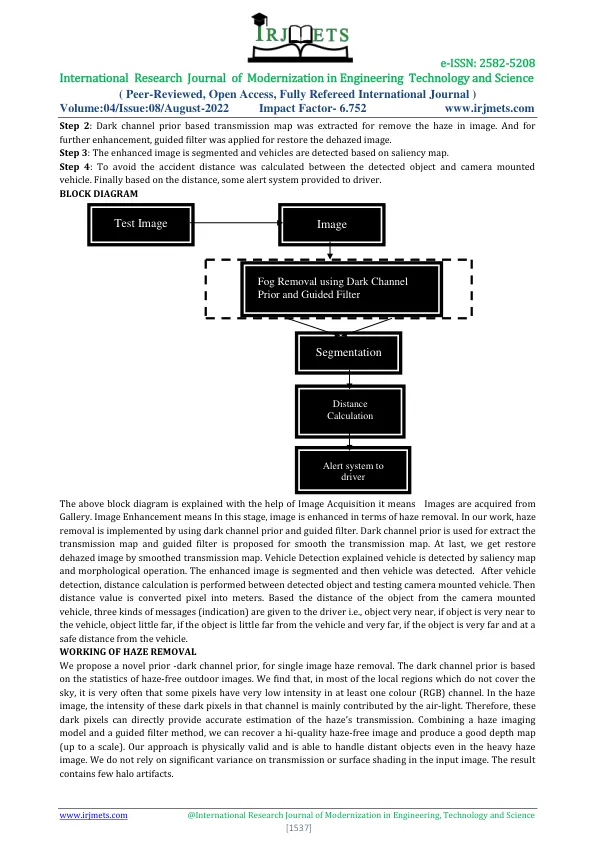
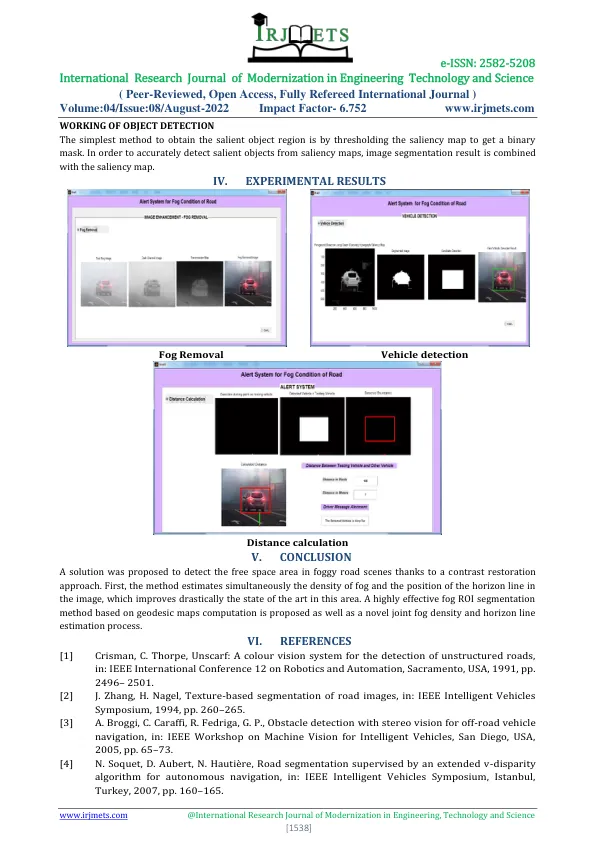
摘要 汽车导航严重依赖于自由空间检测。不幸的是,传统方法在恶劣的天气条件下会遇到困难,尤其是在白天。本文提出了一种解决方案,使用对比度恢复方法对车载摄像头捕获的图像进行处理。在几个方面,所提出的方法都推动了现有技术的进步。首先,通过计算最短路线图,可以更好地分割感兴趣的雾区域。其次,一起计算雾密度和地平线位置。然后,该方法通过假设道路平坦并检测垂直物体来恢复道路的对比度。最后,通过分割车辆前方的连通分量来确定自由空间区域。为了预测该方法的有效性,进行了实验验证。在从车载摄像头捕获的视频序列中提取的样本图像上显示了各种结果。所提出的方法是对依赖颜色分割和立体视觉的现有自由空间区域检测方法的补充。
增强雾检测和自由空间分割
主要关键词

相关文件推荐