机构名称:
¥ 1.0
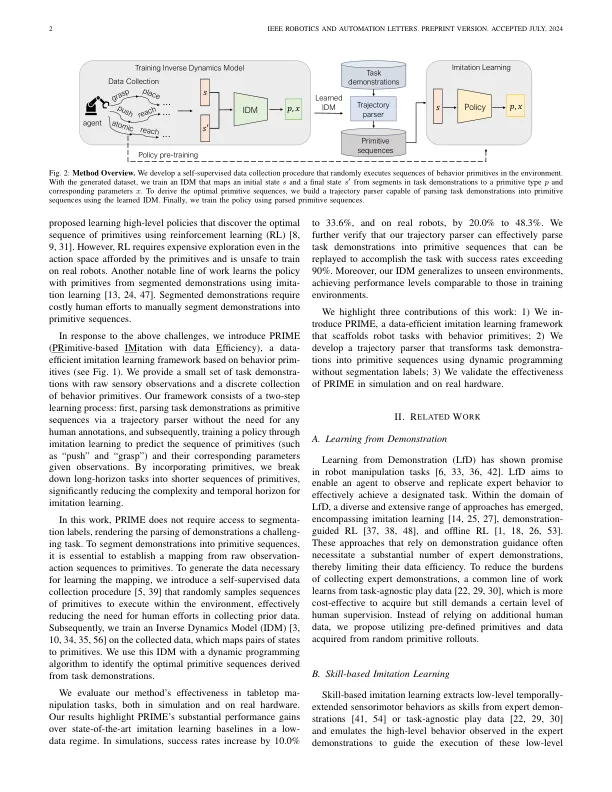
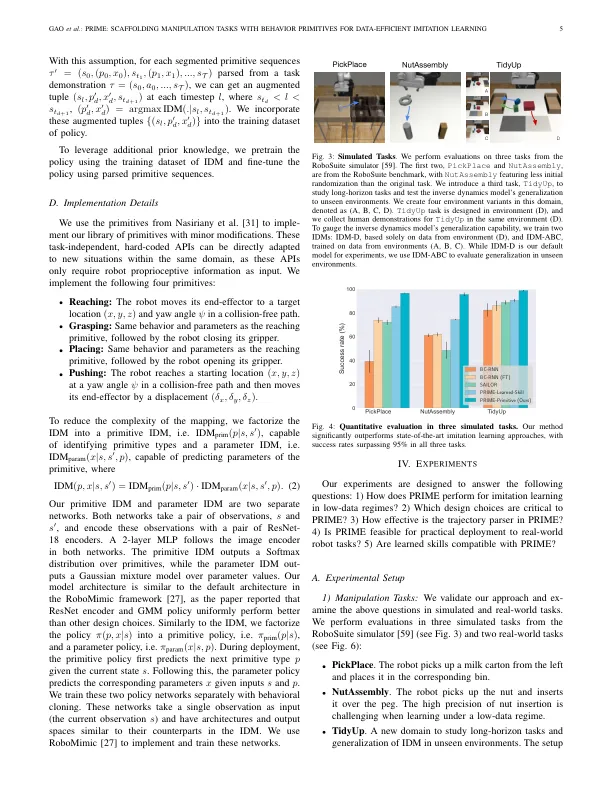
摘要 模仿学习已展现出使机器人获得复杂操作行为的巨大潜力。然而,这些算法在长期任务中样本复杂度较高,复合误差会在任务范围内累积。我们提出了 PRIME(基于数据效率的 PRimitive-based IMitation),这是一个基于行为原语的框架,旨在提高模仿学习的数据效率。PRIME 通过将任务演示分解为原语序列来构建机器人任务,然后通过模仿学习学习高级控制策略对原语进行排序。我们的实验表明,PRIME 在多阶段操作任务中实现了显著的性能提升,模拟成功率比最先进的基线高出 10-34%,在物理硬件上的成功率高出 20-48%。1
使用行为原语搭建操作任务的脚手架......
主要关键词



相关文件推荐