机构名称:
¥ 1.0
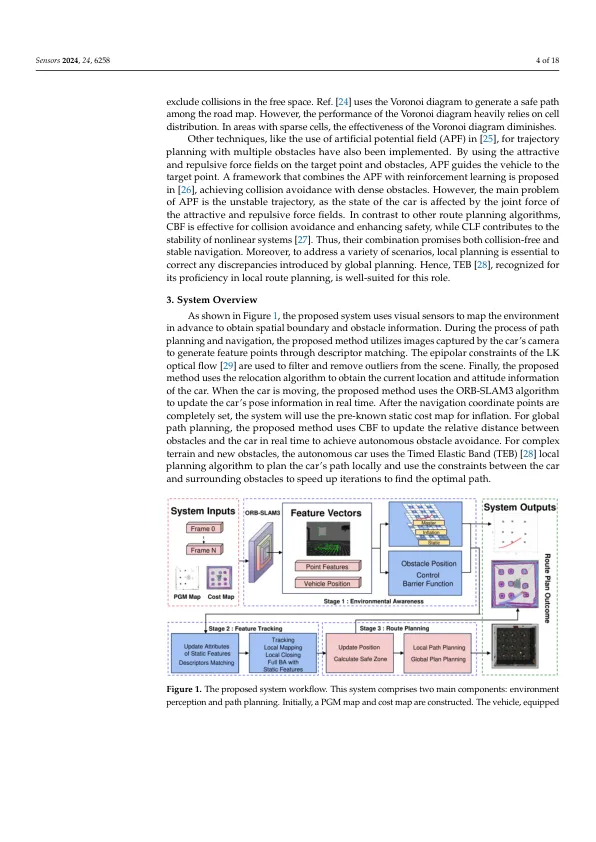
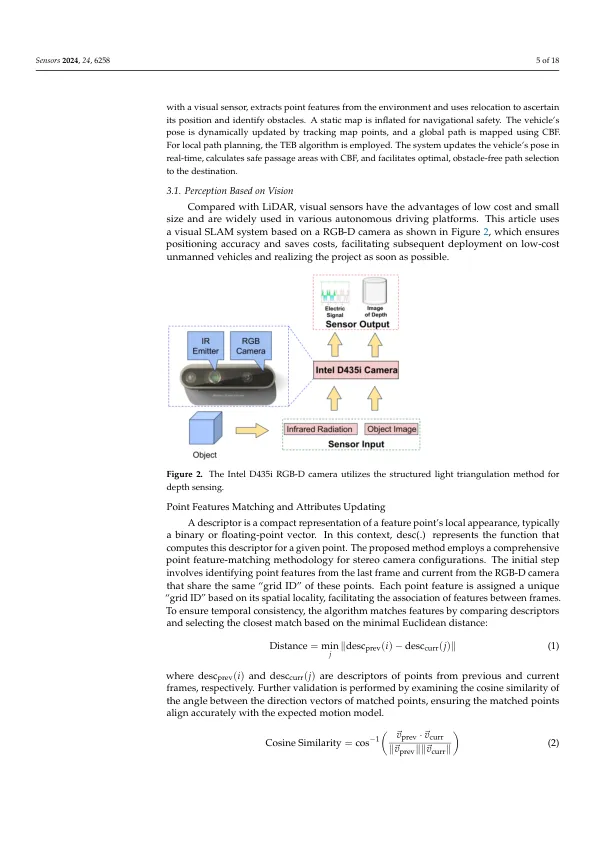
摘要:本文提出了一种基于视觉的障碍物避免自动自动驾驶汽车,可以使用单个RGB-D摄像头在仅CPU的设备上运行。该方法由两个步骤组成:视觉感知和路径计划。视觉感知部分使用Orbslam 3增强了使用光流量来估计汽车的姿势并从场景中提取丰富的纹理信息。在路径计划阶段中,提出的方法采用一种方法,将控制lyapunov函数和控制屏障功能结合起来,形式是二次程序(CLF-CBF-QP)以及障碍物形状重建过程(SRP)来计划安全稳定的轨迹。为了验证提出方法的性能和鲁棒性,使用凉亭模拟环境在各种复杂的室内环境中使用汽车进行了模拟实验。提出的方法可以有效地避免在场景中遇到障碍。所提出的算法在实现多个模拟场景的更稳定和较短的轨迹方面优于基准算法。
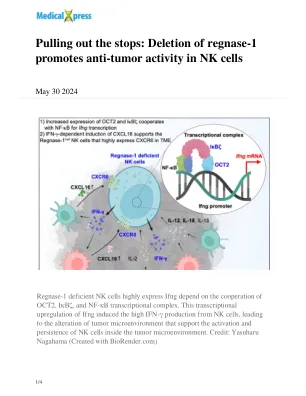
ACKR2缺陷型NK细胞增强CCR2的表达增加了肿瘤细胞治疗疗效
主要关键词
相关文件推荐