点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
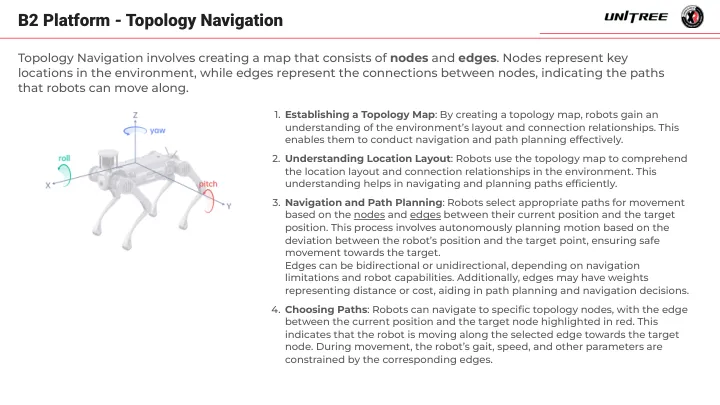
基于其当前位置和目标位置之间的节点和边缘。此过程涉及根据机器人位置和目标点之间的偏差自主计划运动,从而确保安全向目标行驶。边缘可以是双向的或单向的,具体取决于导航限制和机器人功能。此外,边缘可能具有代表距离或成本的权重,有助于路径规划和导航决策。
主要关键词