机构名称:
¥ 1.0
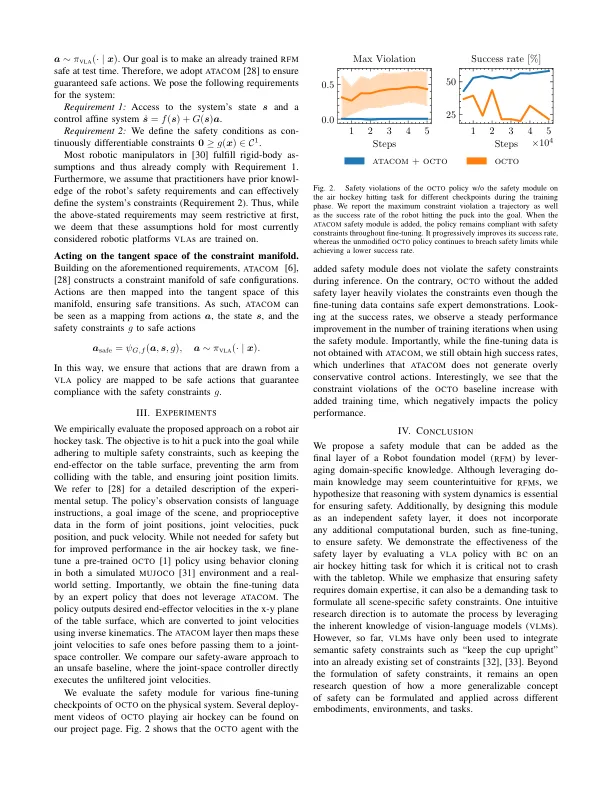
摘要 - 机器人基金会模型具有从工业范围到家庭任务的各种环境中部署的潜力。当前的研究主要关注政策在各种任务中的概括能力,但它无法解决安全,这是对现实世界系统部署的关键要求。在本文中,我们引入了一个安全层,旨在限制任何通才政策的行动空间。我们的方法使用Atacom,这是一种安全的加强学习算法 - 创建安全的行动空间,因此可以确保安全的国家过渡。通过将Atacom扩展到通才政策,我们的方法促进了他们在安全方案中的部署,而无需任何特定的安全性调整。我们证明了该安全层在空气曲棍球环境中的有效性,在该环境中,它防止了冰球击中的药物与周围环境相撞,这在通才政策中观察到了失败。https://sites.google。com/robot-learning.de/to-safe-rfm
迈向安全机器人基础模型
主要关键词


相关文件推荐