机构名称:
¥ 3.0
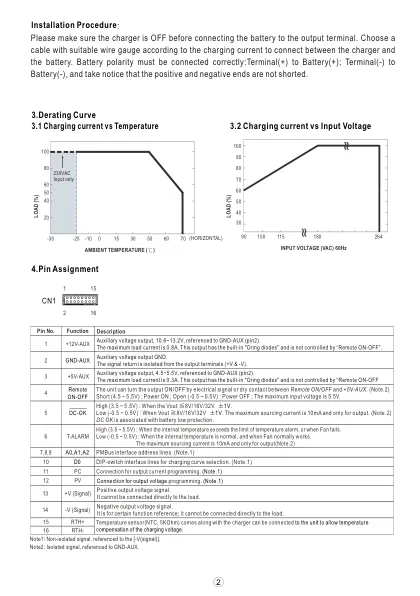
用户可以使用三种不同的方法来控制RPB-1600的输出。该方法之间的控制优先级如下:通信(PMBUS或CAN BUS)> PV/PC> SVR。这三种控制方法可以互换使用。使用通信控制时,必须在4秒内与设备进行通信。否则,程序将重置控制优先级,并将通信参数设置回工厂默认值(注意1)。但是,以下条件将绕过此控制逻辑:将RPB-1600设置为充电器模式。在充电器模式下,PV/PC和SVR控件只能通过通信更改与充电相关的设置。注意:1。当D0设置为“ 1”并使用通信功能时,如果发生任何条件,则某些参数将返回到出厂默认值,请回收和通信超时。以RPB-1600-12为例,命令操作将开始,VO和IO更改为12V和100A。2.在充电器模式,远程开/关或操作开/关以激活新曲线的新曲线过程,并导入参数和设置新曲线profe。此外,它还可以释放由curve_cc_timeout,curve_cv_timeout或Curve_tp_timeout引起的保护措施,这是由于超时而引起的。
RPB-1600说明手册
主要关键词

相关文件推荐